
А началось все в 1983 г., когда в журнале "КиЯ" №106 была напечатана статья, знакомящая с катером "Paysetter" со стреловидным реданом (автор проекта — Е. Клемент, Англия). В статье сообщалось, что гидродинамическое качество стреловидной несущей поверхности превышает К=8.0, и это — на скорости FrΔ>0. Однако, как обычно в такого рода статьях, отсутствовал один ключевой параметр — смоченная длина по скуле, что затрудняло проверку приведенных в ней цифр, описывающих геометрию смоченной поверхности и ее гидродинамические характеристики. Сделать это все-таки удалось, для чего пришлось ни много ни мало проанализировать все доступные инженерные методики гидродинамических расчетов глиссирующих катеров и создать на их основе свою собственную, пригодную для стреловидных в плане несущих глиссирующих поверхностей, в том числе малого глиссирующего удлинения λгл<1.0.
Вот выводы, к которым я пришел:
- Су плоскокилеватой глиссирующей пластины зависит только от относительной скорости — числа Фруда по ширине Frb и эквивалентного глиссирующего удлинения λэ;
- λэ, в свою очередь, зависит от глиссирующего удлинения λгл и от угла стреловидности передней кромки смоченной площади. Чем больше стреловидность по передней кромке смоченной поверхности, тем меньше ее Су и подъемная сила.
Поскольку одному углу килеватости при разных углах атаки соответствуют разные углы стреловидности, все основные гидродинамические характеристики необходимо определять в зависимости от угла стреловидности по передней кромке смоченной площади, а не от угла килеватости днища, как это обычно принято. Идея, в общем, не новая, но в расчете глиссирующих корпусов ни разу еще не встречалась.
От углов килеватости, вообще говоря, зависит только cos β, делением на который смоченной площади на виде "сверху" получается реальное значение смоченной площади в расчете сил сопротивления трения.
Стреловидность, или значительное искривление по передней границе смоченной поверхности, может иметь и совершенно плоская глиссирующая пластина — пусть днище плоское, да только вода не бывает "плоской" практически никогда. Соответственно и несущие характеристики даже абсолютно плоской поверхности могут быть, как у сильно килеватого днища: низкий Су и т. д. Это относится и к малокилеватым или плоскодонным корпусам при их движении на волнении, и к кормовым несущим участкам днища катеров с поперечными реданами. Прямой редан на килеватом днище при обычных для корпусов катеров пропорциях создает несущий участок, который сразу после выхода на глиссирование оказывается смоченным на неполной ширине. В зареданном пространстве создается волновая система, настолько сильно увеличивающая смоченную площадь в корме, что это сводит на нет все теоретические преимущества поперечного редана, а главное — является причиной многих неустойчивостей. Это относится практически ко всем катерам с поперечными реданами, фотографии которых можно увидеть в журналах. Кормовой участок нужно "вписывать" в волновую систему, создаваемую первыми реданами, а это отдельная проблема, которую лучше всего решать "в паре" с основным стреловидным реданом. Днище позади редана должно иметь форму, рассчитанную на режимы движения на неполной конструктивной ширине редана, в противном случае неизбежны ограничения по скорости и мореходности.
Пока удалось найти только две модификации обводов корпуса катера и реданов, удовлетворяющие всем условиям устойчивости и максимального гидродинамического качества. Они отличаются друг от друга отношением L/B, центровкой, сужением к транцу, формой реданов и т. д., и обе сильно отличаются от привычных обводов.
И еще об углах килеватости и мореходности: значения углов склона по профилю волны, даже без учета ветрового влияния, достигают 30°, это значит, что катер, в том числе с сильно килеватым днищем (порядка 25°), периодически будет испытывать плоские удары о воду. Хотя килеватые корпуса в среднем действительно более мореходны, чем мало-килеватые, очевидно все же, что влияние на мореходные характеристики обводов корпуса не исчерпывается одной только его килеватостью, на нее влияют и другие параметры, например, распределение всех выпуклостей-вогнутостей по длине судна, форма килевой линии и "подреза" форштевня и т. д. И сильно влияют!
Катер со стреловидным реданом
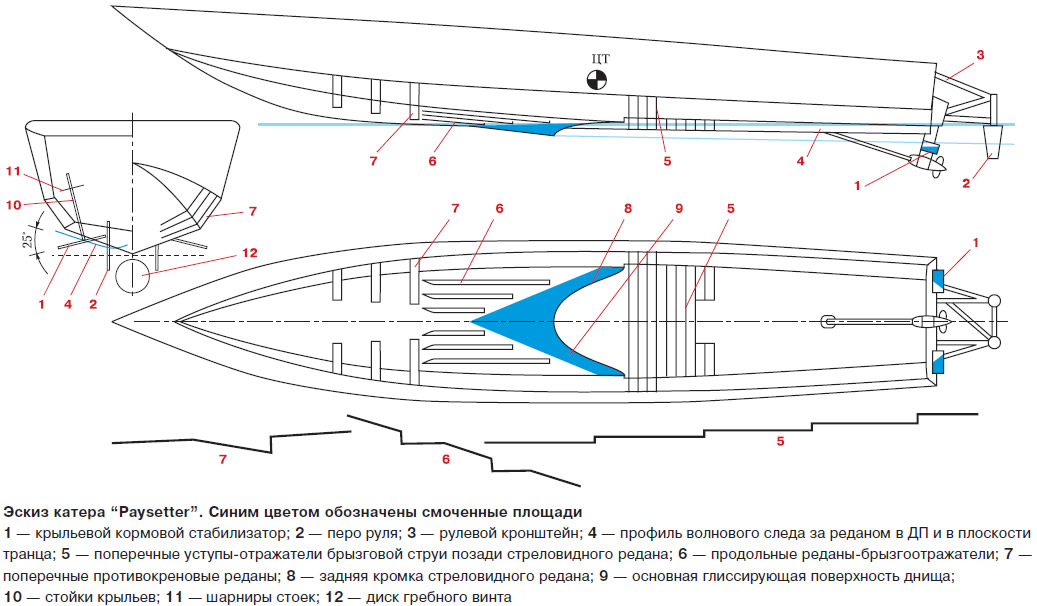
В октябре-ноябре 2000 г. на заводе проводились буксировочные испытания модели перспективного легкого гидросамолета со стреловидным реданом на днище и модели катера, также со стреловидным реданом1, причем на том же оборудовании, что и модель гидросамолета. Их цель—определение элементов геометрии редана и ее влияния на гидродинамические характеристики: сопротивление, устойчивость движения, брызгообразование, общую мореходность. Хронологически модель катера была первой, так как параметры стреловидного редана и идеология его применения отрабатывались именно на моделях катеров и для катеров.
Модели катеров (а их было много — общее количество вариантов составляет, наверное, несколько тысяч) имели пенопластовый корпус, оклеенный стеклотканью. Обводы менялись путем обстругивания пенопласта или подклеивания пластилина в соответствии с корректировкой первоначальной идеи. Обыкновенный пластилин при температуре воды ниже 15° каменеет, выдерживая любой мыслимый скоростной напор, в то же время позволяя легко вносить любые изменения в обводы будущего катера. Размеры моделей были разными — модель катера "Амур", например, имела длину порядка 1.4 м; выполнена в масштабе 1:4. При ее буксировках гидродинамическое качество составило К=11 в диапазоне скоростей 60-120 км/ч.
Одновременно протаскивалась и модель с традиционными обводами, что позволяло сопоставлять получаемые данные. Во время испытаний проводились видеофотосъемки. Ожидалось улучшение всех перечисленных характеристик модели катера или, по крайней мере, снижение сопротивления при обычном для килеватых корпусов уровне мореходности.
Результаты оказались следующими:
- Модель катера со стреловидным реданом (полный вес — 1850 г) в диапазоне скоростей буксировки 12-40 км/ч имела сопротивление 300-340 г при волнении высотой 5-20 см.
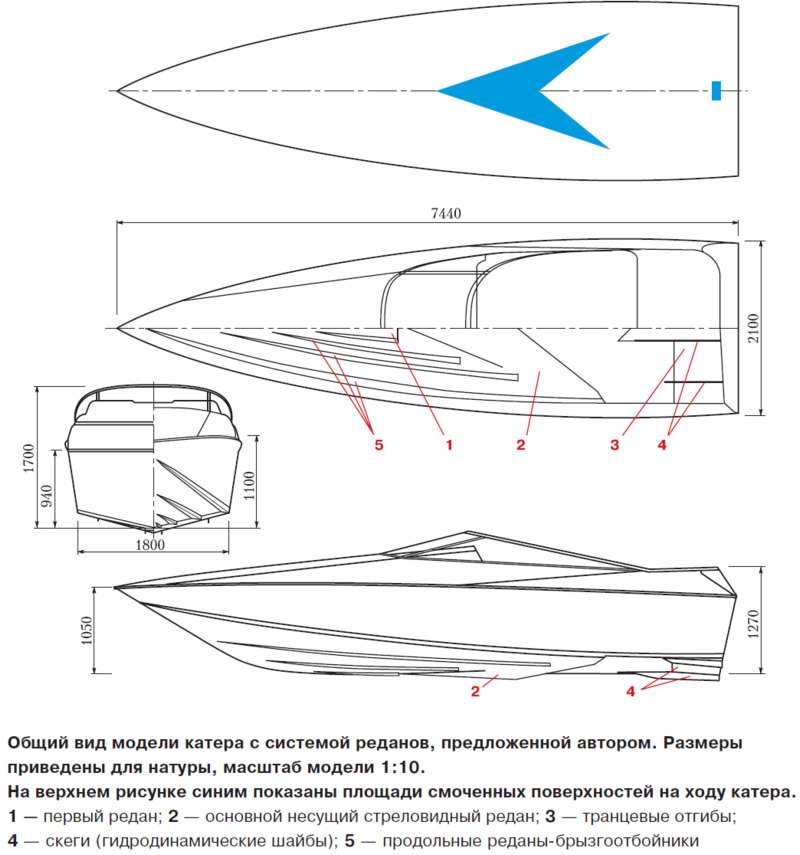
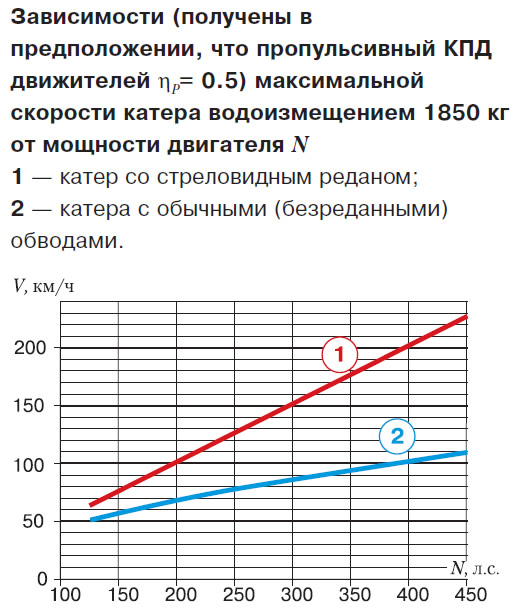
- Форма обводов катера продиктована стремлением достичь максимальных скоростей хода не менее 140-200 км/ч при волнении высотой до 2 м и уровнях энерговооруженности 10-5 кг/л.с. для судна весом около 2000 кг. Это и определило стреловидную форму редана, необходимую для получения его геометрии, взаимно согласованной с общими обводами корпуса катера, а также для максимального уменьшения гидродинамического сопротивления, обеспечения минимума перегрузок и минимума прироста сопротивления при ходе на волнении.
- Форма смоченного несущего пятна на редане, подъемная сила на нем, сила сопротивления и точка приложения подъемной силы в зависимости от скорости движения предварительно рассчитаны по собственной методике. Наличие ее позволяет оптимизировать форму корпуса и реданов для заданных условий: скорости, нагрузки, ожидаемого уровня мореходности.
- Гидродинамическое качество для натуры на спокойной воде, согласно расчетам, может составить К=8.0-12.0 и более, в зависимости от конкретной модификации реданов. С пересчетом по критериям моделирования катер длиной 7.4 м, полным водоизмещением 1850 кг будет иметь гидродинамическое качество (отношение полного водоизмещения к сопротивлению) не менее К=7.0 при скоростях движения 40-120 км/ч, т е. сопротивление снизится в 1.5-2 раза по сравнению с аналогичными катерами с традиционными обводами, и все это — на метровой волне.
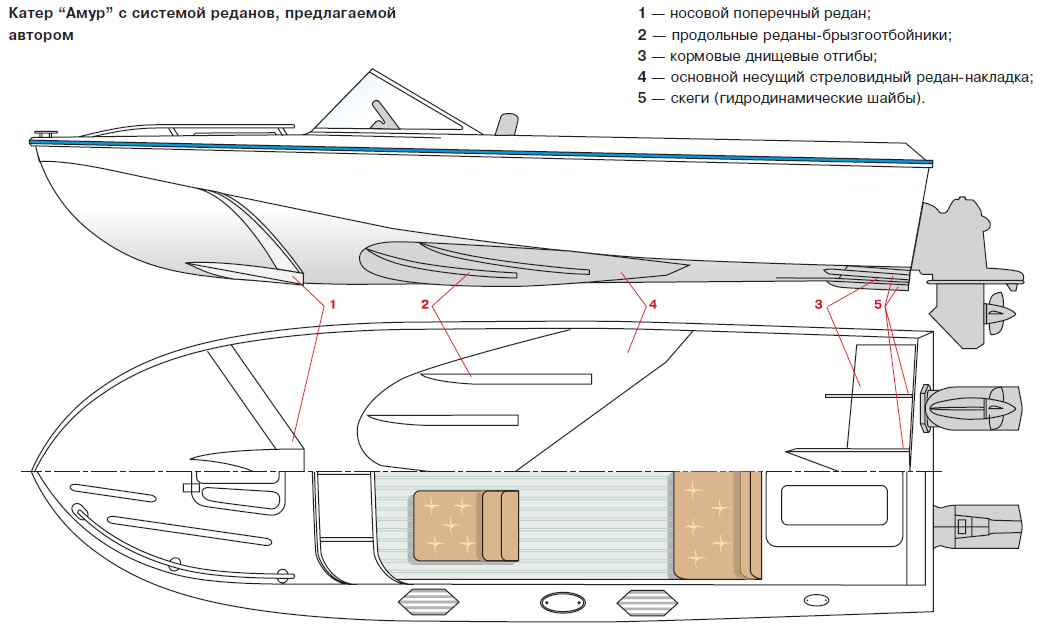
- Обводы — с разворачивающимися на плоскость поверхностями. Все реданы выполнены в виде отдельных элементов — накладок на корпус, т. е. катер можно представить состоящим из исходного "голого" корпуса с плоско-килеватым днищем с углом килеватости β=14°, и установленными на нем элементами гидродинамики: стреловидным несущим реданом, первым реданом, продольными реданами, транцевыми отгибами. Такое подразделение дает возможность в процессе отработки обводов катера, меняя форму и расположение накладок оценить влияние каждого элемента на поведение модели, и кроме того, при постройке катера дать ряд технологических преимуществ. Угол килеватости днища на редане — порядка 24°.
Характеристики мореходности при этом не хуже, чем у безреданных катеров с углами килеватости днища β=17-24°. Несмотря на волнение, движение устойчивое, изменение углов дифферента по профилю волны небольшое, по крайней мере не больше, чем у обычных глиссирующих судов.
Совпадение результатов расчетов и эксперимента с удовлетворительной степенью точности говорит о достаточной надежности и методов испытаний, и методики расчета.
Судя по поведению моделей во время буксировок, катер со стреловидным реданом сохраняет устойчивый характер движения до скоростей FrΔ=14-18 (не менее), т. е. до этих скоростей возможна нормальная безопасная эксплуатация катера при сохранении достаточной степени устойчивости по трем осям — тангажу, крену и курсу.
По результатам испытаний и отработки обводов можно отметить сильное влияние формы всех гидродинамических элементов на общие ходовые характеристики глиссирующего корпуса — сопротивление движению, прирост сопротивления на волнении, характер динамической реакции на внешние воздействия (т. е. мореходность).
Область оптимального сочетания форм всех гидродинамических элементов чрезвычайно узка — углы стреловидности, например, не могут отклоняться от оптимальной величины более чем на 1.5-2°, все высоты реданов по задней кромке относительно исходного контура плоско-килеватого днища — соблюдаться с точностью ±1 мм (для натуры). Это, собственно, и есть ответ на вопрос: почему до сих пор подобные обводы не были найдены? Из-за узости оптимальной области. Случайно угадать идеальное сочетание 10-20 независимых параметров, описывающих форму корпуса катера и реданов, с шагом изменения каждой независимой величины хотя бы в 20% всего диапазона изменения просто невозможно; найти оптимум методом "малых приращений", совершенствуя существующие обводы, тоже нельзя. Для этого нужна довольно развернутая программа исследований, но сначала следует доказать, что искомый оптимум — цель этих исследований — вообще существует.
На основе результатов модельных испытаний, имевших сугубо предварительный характер, можно сделать следующий вывод: резервы повышения скоростных качеств мореходных глиссирующих катеров без снижения ставших привычными уровней комфортности пребывания экипажа на борту есть, и большие.
Это означает появление реальных шансов выиграть в конкурентной борьбе на катерном рынке, ведь общепризнано, что максимально достижимая скорость хода — один из самых привлекательных для покупателя показателей, определяющих общие потребительские свойства катеров и, соответственно, их сбыт.
Конкретно для завода катер имеет смысл делать под двигатели суммарной мощностью 90-120 л.с., т. е. под два стандартных конвертированных "москвичевских" двигателя вместе с заводскими колонками — места в корме должно хватить. Это — самый дешевый и эффективный вариант достижения сверхскоростей на воде. Подбор винтов — за исполнителем, что представляет собой действительно серьезную проблему. Нужен совершенный привод с ЧПВ, что означает необходимость проектирования, изготовления и отработки приводов движителей и самих винтов, а для этого требуется наличие производства, способного изготовить экспериментальный комплект винтов с высокой степенью точности из высокопрочных, коррозионностойких материалов (титан, нержавеющая сталь). Именно поэтому я не занимался самодеятельной постройкой катера — как-то изготовить один ЧПВ в кустарных условиях еще можно, но подобрать должные его характеристики — нет. Для этого нужно затевать серию из 10-20 винтов, титановых, полированных, с идеально идентичной геометрией всех лопастей, с гарантиями качества, просчитанной прочностью по всем типам нагрузок, и все это — для сдвоенного привода встречного вращения. Это работа явно не для самодеятельного одиночки.
Есть еще одно непременное условие: надо следить за центровкой катера. Ездить как попало, перегружая то нос, то корму — не получится. В перспективе можно получить скорость далеко за 100 км/ч. Кстати, обычный катер "Амур" до таких скоростей разогнать невозможно никакими способами: он напрочь теряет курсовую устойчивость уже после 60 км/ч. Стреловидный редан, кроме всего прочего, избавляет судно и от этого, крайне серьезного, порока.
Должен предупредить: не вздумайте копировать геометрию реданов-накладок, руководствуясь приведенным в статье эскизом. Как уже было сказано, допуски на форму реданов довольно жесткие, а рисунки приблизительные, дают только общее представление.
Обоснование концепции стреловидного редана
Из публикаций в водно-моторных журналах и каталогов катеростроительных фирм видно, как в последнее время вырос интерес к катерам с поперечными реданами. Теоретически поперечный редан (т. е. поперечный уступ на днище) дает уменьшение смоченной площади и снижение гидродинамического сопротивления с ростом скорости движения, что означает значительный выигрыш по сравнению с обычными безреданными корпусами, у которых с увеличением скорости сопротивление непрерывно увеличивается.
Для глиссирующих судов, так же как и для любых других аппаратов с динамическими принципами поддержания, характерен баланс сопротивлений сил трения и давления, и зависит он от угла атаки. Минимум общего сопротивления достигается при строго определенном угле атаки, обычно он равен примерно 4°. Нужно сделать хотя бы несколько прикидочных расчетов образующейся на днище судов с обычными обводами подъемной силы, чтобы прийти к выводу: для них характерен огромный избыток несущих площадей, и при скоростях полного хода не может идти речь о какой-либо оптимальности по углам атаки — они всегда намного меньше желаемых. Отсюда — неуклонный рост сопротивления с ростом скорости и склонность к перегрузкам на волнении (при FrΔ>3.0).
Для поддержания веса судна при оптимальных углах атаки достаточно лишь небольшой части общей смоченной площади днища — это и есть обоснование идеи поперечного редана, который просто исключает часть днища из общей площади обтекания и образования подъемной силы, обеспечивая на расчетном участке оптимум углов атаки и минимум сопротивлений. Поскольку на килеватом корпусе передняя кромка смоченной поверхности — стреловидная, максимально "обрезать" лишнюю смоченную площадь может только стреловидный уступ на днище. Редан стреловидной формы обеспечивает при этом минимально возможное глиссирующее удлинение λгл=l/b и максимальное гидродинамическое качество (при некоторых дополнительных условиях: тут все не так просто).
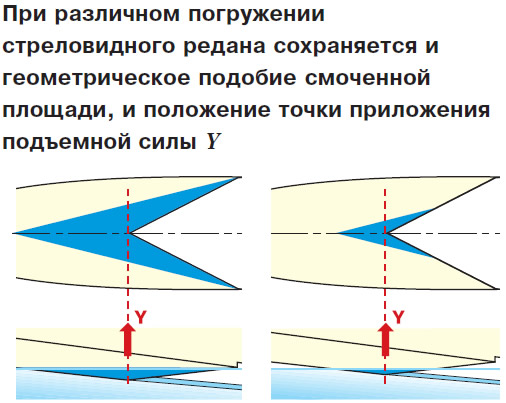
Одна из наиболее интересных особенностей поперечного редана стреловидной формы — сохранение геометрического подобия смоченной площади, независимо от степени его погружения в воду.
При определенных пропорциях редана гидродинамическая подъемная сила Y не будет перемещаться по длине судна, оставаясь "привязанной" к одной фиксированной точке, или будет перемещаться, но в заданных пределах, в соответствии с замыслом конструктора. Это позволяет говорить о гораздо более стабильном характере движения такого катера на волнении, чем судов с обычными прямыми поперечными реданами.
Устойчивость движения
При стреловидном редане образуется смоченное пятно, которое при равной площади по сравнению с любым другим имеет наибольшие длину и ширину. Это означает значительно большее демпфирование продольных и поперечных колебаний, а именно демпфирования, т. е. гашения колебательных процессов для реданных катеров всегда катастрофически не хватает. От решения этой проблемы зависит обеспечение продольной и поперечной устойчивости движения судна и его управляемости. Не имеет смысла говорить о высоком гидродинамическом качестве, если эксплуатация судна невозможна из-за нестабильности движения, делающей его малоуправляемым и потому опасным для экипажа.
Очевидно, что мореходность будет зависеть от того, каким образом судно реагирует на воздействия от ударов волн, т. е. от его динамических характеристик. Видимо, надо пояснить, что понимается под "динамическими характеристиками" и "устойчивостью".

Динамическая характеристика — это форма зависимости переходного процесса системы из состояния "начального" в "конечное" от времени. Чтобы определить динамическую характеристику системы, надо приложить к ней единичное воздействие — толкнуть, попросту говоря, и посмотреть, что из этого получится (отсюда очевидна испытательная методика, которой можно пользоваться при отработке обводов моделей катеров в опытовых бассейнах). Оптимальность характеристик регламентирована: система (катер, автомобиль, самолет) не должна совершать более определенного числа колебаний после толчка и слишком медленно или слишком быстро возвращаться в конечное состояние равновесия. Термин "динамическая характеристика" применительно к глиссирующим судам мне до сих пор не встречался нигде.
Когда упоминаются динамические характеристики, надо знать, о какой именно идет речь. Наиболее актуальными считаются следующие: угловое положение (и ее производная) корпуса судна относительно поперечной горизонтальной оси z в зависимости от времени (и от степени отклонения); эта зависимость связана с общим характером продольной устойчивости движения. Вертикальная координата центра тяжести (или ее производная) в зависимости от времени характеризует вертикальную устойчивость и перегрузки, а угловое положение по продольной оси (и ее производная) — общую устойчивость движения в поперечной плоскости (т. е. "по крену"), а также угловое положение и ее производную судна по вертикальной оси, по которой можно судить о курсовой устойчивости движения судна.
Динамикой поведения систем занимается теория автоматического управления. Эта наука основана на математике, она не любит нелинейных систем. Глиссирующий катер — сугубо нелинейная система, со всем набором нелинейностей, вплоть до разрывов характеристик и гистерезисов, и выразить аналитически его характеристики почти невозможно. Поэтому, видимо, в области глиссирующего судостроения еще долго будет оставаться простор для фантазий и изобретений.
Проблема общей устойчивости движения — ключевая для глиссирующего реданного катера, она стоит очень остро. Даже упрощенные методы модельных испытаний, позволяющие уже на первоначальном этапе проектирования перебрать максимальное количество вариантов обводов будущего катера, гарантируют от многих типичных ошибок катеростроителей. Не желая рисковать и не веря в свои силы, проектировщики копируют одни и те же формы корпусов, со всеми их органическими пороками. Это, конечно, позволяет избежать еще больших рисков и неопределенностей, связанных с внедрением новых обводов, а самое главное — не заниматься чрезвычайно трудоемким и для многих малопонятным процессом их экспериментальной отработки, но где нет нового, там нет и успеха, в том числе рыночного.
Снижение сопротивления судна всегда находится в противоречии с его динамическими характеристиками: чтобы снизить сопротивление, надо уменьшить смоченную площадь; чем меньше смоченная площадь, тем хуже демпфирование вынужденных колебаний; чем хуже демпфирование, тем меньше устойчивость и ниже мореходность. Кроме того, динамические характеристики нужно не улучшать, а оптимизировать, целенаправленно меняя демпфирующие свойства обводов корпуса катера в большую или меньшую сторону, в зависимости от желания проектировщика, а для этого нужно знать, как они связаны с параметрами обводов судна. В пределах патентной формулы RU 2085429 это вполне осуществимо.
Любой проект имеет свои недостатки, есть они и у предлагаемых новых обводов:
- при движении с большим углом дрейфа (на крутом повороте) несколько ухудшаются характеристики продольной устойчивости, но, на мой взгляд, не более, чем у обычных катеров;
- при сильном боковом ветре и отсутствии волнения катер сильно "сдувается" с курса (это относится к одной из двух компоновок), ведь в воде почти ничего нет, практически весь корпус находится в воздухе. Это вообще характерно для всех катеров с кормовой центровкой, и в общем не смертельно — придется несколько переложить руль "на ветер".
Впрочем, наверное, не стоило бы и говорить об этом — такие условия встречаются достаточно редко.
Вот и все недостатки.
Требования к движителям
Интересно, приходила ли кому-нибудь в голову у нас, в России, идея заняться проектированием гоночного катера открытого моря класса "Offshore", предназначенного для участия в реальных соревнованиях по правилам UIM? Это имеет смысл лишь в том случае, если есть гарантия успеха предприятия, ведь катер должен претендовать только на первое место. Если излишне не скромничать, то можно сказать, что данный материал как раз и является такой гарантией. Я уверен, что проблема создания глиссирующего корпуса, рассчитанного на скорости хода 100-250 км/ч в условиях открытого моря и значительно превосходящего по своим характеристикам существующие аналоги, вполне решаема.
Серьезной задачей (по крайней мере, для нас) остается подбор или проектирование подходящего движителя.
Из-за сильной аэрации потока за реданом для больших скоростей движения неприменимы обычные гребные винты и тем более водометы. Речь может идти только о частично погруженных вентилируемых гребных винтах регулируемого шага (ЧПВ-ВРШ), возможно с автоматически регулируемым шагом и автоматически следящим приводом степени погружения диска гребного винта под поверхность воды.
Возлагать на привод еще и задачу управления катером по курсу, как в приводах Арнесона, излишне — с этим хорошо справляются и обычные рули.
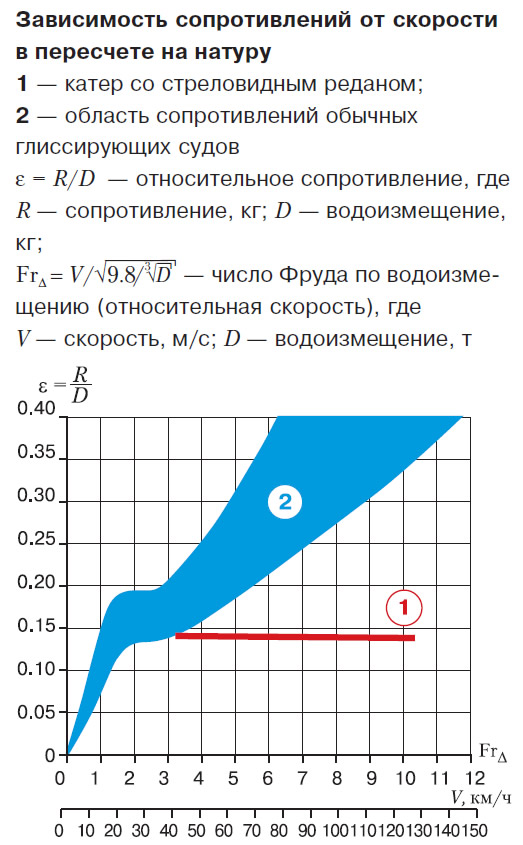
Из приведенных графиков видно, что буксировочные сопротивления в рабочем диапазоне скоростей уменьшаются с ростом скорости, а это и определяет принципиально иные требования к приводам и гребным винтам. Полностью реализовать скоростной потенциал новых обводов можно только, если привод и винт обеспечат реализацию всей мощности двигателя во всем диапазоне оборотов и скоростей движения, а это могут или ЧПВ-ВРШ, или многоступенчатые коробки передач (как на автомобиле) в паре с ЧПВ, или, что тоже возможно, автоматические коробки передач (АКП) — они вполне это допускают.
Каждая из частных проблем — гидродинамически совершенного корпуса, гребных винтов, привода, автоматики — уже имеют свое решение. Нужно только собрать все это в одном проекте, и произойдет качественный скачок в развитии мореходных глиссирующих катеров.
Примечания
1. Параметры реданов — в соответствии с патентом RU 2085429, 1995.