
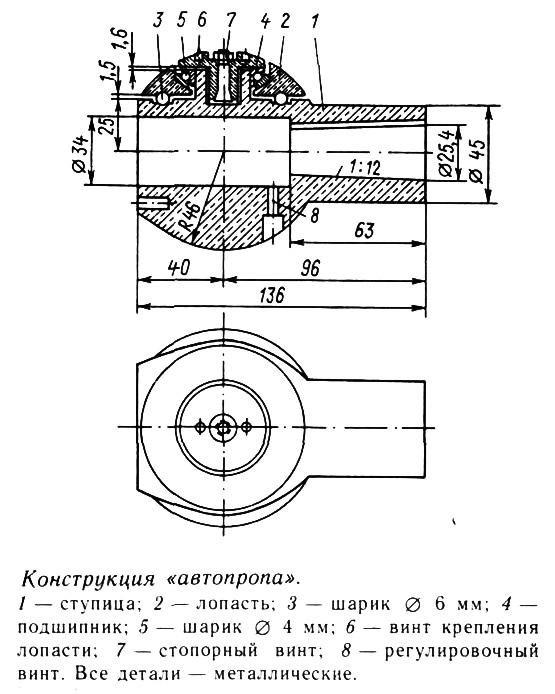
Лопасти этого винта имеют L-образную форму и снабжены цилиндрическими шипами на комлях, которые вращаются в шарикоподшипниках, установленных в ступице. Лопасть может вращаться на 360° вокруг оси шипа, изменяя свой шаг или угол атаки по отношению к набегающему на нее потоку воды. В отличие от других винтов регулируемого шага «автопроп» не имеет механизма для принудительного управления шагом, обычно размещающегося в ступице и соединенного с пультом управления при помощи штанги, расположенной внутри гребного вала. Каждая лопасть «автопропа» вращается относительно своей оси независимо от остальных; угол, под которым она устанавливается по отношению к набегающему на нее потоку воды, определяется скоростью и направлением этого потока, величиной гидродинамических сил, приложенных к лопасти, сил инерции, возникающих при вращении винта, и расположением точек приложения этих сил относительно друг друга.
Проектируя обычный гребной винт, конструктор стремится подобрать его элементы таким образом, чтобы винт преобразовал максимальную мощность двигателя в упор, который необходим для преодоления сопротивления движению судна на определенной расчетной скорости. На скоростях движения, меньших расчетной, такой винт, как правило, оказывается далеко не оптимальным. Вращая его, двигатель перегружается по моменту, не развивает полных оборотов и своей максимальной мощности. При этом он работает далеко не в экономичном режиме; чем ниже скорость судна, тем больше топлива затрачивается на вращение винта, а не на эффективное продвижение вперед. С таким явлением знаком каждый водитель моторной лодки, которому приходилось буксировать другие суда: сопротивление в сумме резко возрастает, скорость падает, а горючее в баке катастрофически убывает...
О низкой эффективности обычного винта на заднем ходу говорить не приходится, особенно, если двигатель не укомплектован реверс-редуктором, дающим на заднем ходу существенно более низкую частоту вращения гребного вала, чем на переднем. Многие малые суда имеют такую незначительную скорость на заднем ходу, что практически не управляются.
Благодаря свойству автоматически изменять шаг, «автопроп» оказывается близким к оптимальному винту в достаточно широком диапазоне поступательной скорости судна и частоты вращения гребного вала. При реверсировании каждая лопасть поворачивается вокруг своей оси таким образом, что и на заднем ходу оказывается направленной своей входящей кромкой против направления набегающего потока, а выпуклая «засасывающая» поверхность лопасти, на которой создается разрежение гидродинамического давления, обращена назад, то есть в сторону движения судна. Поэтому «автопроп» создает практически такой же упор на заднем ходу, что и на переднем. Кроме того, если застопорить гребной вал на яхте, идущей под парусами, лопасти установятся во флюгерное положение.
Представим графически скорость потока, обтекающего лопасть гребного винта в каком-либо ее поперечном сечении, и действующие на нее гидродинамические силы. Воспользуемся широко применяемым в гидродинамике принципом обратимости движения: будем считать сечение лопасти неподвижным, а воду — натекающей на нее с такой же скоростью, но противоположно направленной.
При вращении винта лопасть движется относительно воды с окружной скоростью Vr = 2π·r·n (π=3,14; r — радиус, на котором расположено рассматриваемое сечение; n — частота вращения винта) и одновременно перемещается вместе с судном со скоростью VA.
Лопасти винта сообщают натекающим массам воды дополнительные скорости — осевую и и окружную w (этот эффект можно заметить по струе воды, сходящей с винта).
Просуммируем векторы всех скоростей, чтобы получить результирующую скорость W и угол атаки сечения лопасти относительно набегающего на него потока α. Расположение сечения под этим сравнительно небольшим углом к потоку и является причиной возникновения разрежения на спинке профиля лопасти, а на ее нижней поверхности — повышенного давления и, соответственно, гидродинамической силы F. Она дает составляющие: Р — упор винта, толкающий судно вперед, и Т, направленную перпендикулярно оси винта — она создает момент, который должен преодолеваться вращающим моментом двигателя.
В гидродинамике результирующую силу F принято рассматривать как векторную сумму подъемной силы Y, направленной перпендикулярно потоку, набегающему на профиль, и сопротивления R. совпадающего с направлением потока. На нашей схеме сумма двух углов α+φ есть ничто иное, как шаговый угол лопасти — на винтах фиксированного шага он имеет определенную неизменяемую величину в каждом сечении, уменьшаясь по длине лопасти в направлении от ступицы к краю.
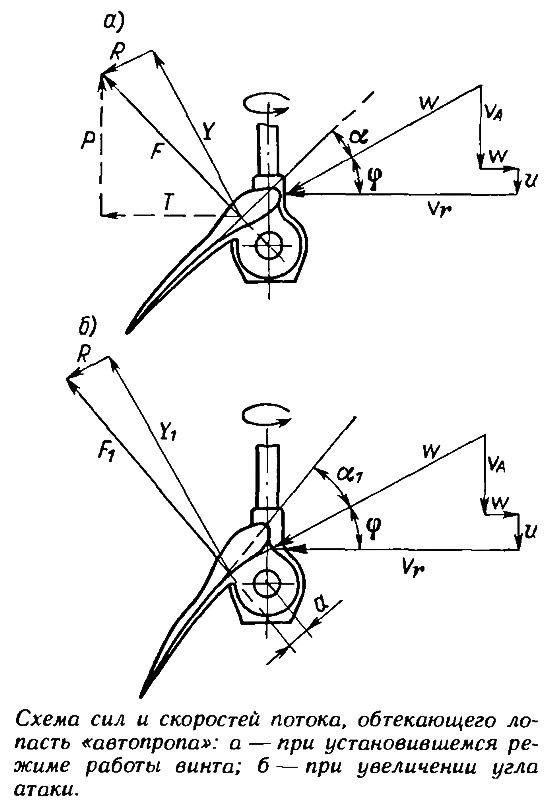
При установившемся режиме работы винта линия действия силы F проходит через ось вращения лопасти «автопропа», которая сохраняет свое устойчивое положение. Если же по каким-либо причинам лопасть повернется в сторону увеличения угла атаки α1 (см. схему б), то величина подъемной силы Y1 возрастет заметно больше, чем сопротивление R. Поэтому результирующая сила F1, оставаясь приложенной к лопасти в той же точке, изменит свое направление — отклонится вперед по ходу судна. Линия ее действия пройдет мимо оси лопасти — на расстоянии α, поэтому сила F1 повернет лопасть в прежнее положение устойчивого равновесия.
При уменьшении угла атаки α подъемная сила Y уменьшится при незначительном снижении сопротивления R, поэтому результирующая сила F отклонится на нашей схеме влево и линия ее действия пройдет впереди оси вращения лопасти. Лопасть «автоматически» развернется в сторону увеличения угла атаки (шагового угла).
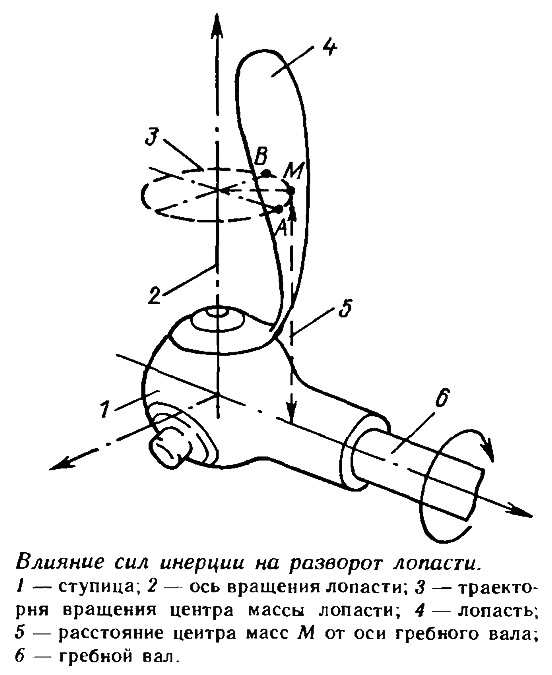
Кроме гидродинамических сил лопасти «автопропа» оказываются под действием центробежных сил, вызванных их вращением вокруг оси гребного вала. На схеме видно, что центр массы лопасти М движется при изменениях шага по круговой траектории. Точка А на этой траектории — самая близкая к вертикальной плоскости, проходящей через ось вала, точка В — наиболее от нее удаленная. Под действием центробежных сил лопасть стремится повернуться таким образом, чтобы центр М сместился в точку В в положение большего шагового угла. Это вносит изменение в рассмотренную выше картину действия гидродинамических сил и приводит к работе «автопропа» с несколько большим углом атаки, чем это определяется условием равновесия гидродинамических сил. Этот эффект был особенно заметен при сравнительных испытаниях «автопропов», изготовленных из бронзы и алюминиевого сплава; бронзовые лопасти отклонялись несколько больше в сторону больших шаговых углов и давали несколько более высокий упор.
Интересно сравнить характеристики работы обычного винта и «автопропа», полученные при испытаниях парусно-моторной яхты «Мьюди-346», оснащенной дизелем мощностью 29 л. с. при 3200 об/мин. Обычно эти характеристики представляются в виде безразмерных коэффициентов упора

и момента

где Р и М — упор и вращающий момент винта, ρ — массовая плотность воды, n — частота вращения винта, D — диаметр винта. Поскольку эти характеристики зависят от скорости вращения винта и поступательного движения его вместе с судном, их представляют в виде графиков, на оси абсцисс которых наносят значение безразмерной относительной поступи винта

Напомним, что поступью винта называется путь, проходимый гребиым винтом в воде за один его оборот. Поступь всегда меньше шага винта на величину скольжения, что и обусловливает работу лопасти под углом атаки к набегающему на нее потоку воды.
Информация об изображении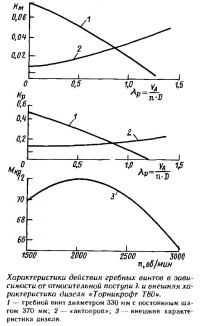
Характеристики действия гребных винтов в зависимости от относительной поступи
Представленные здесь графики позволяют сравнить характер изменения характеристик «автопропа» диаметром 380 мм и винта фиксированного шага диаметром 330 и шагом 370 мм. Если обычный винт развивает максимальный упор и момент при λ=0, то есть при работе на швартовах, а затем их значения уменьшаются с ростом скорости судна, то «автопроп» загружает двигатель практически равномерно во всем диапазоне скоростей — от λ=0 до максимальной скорости.
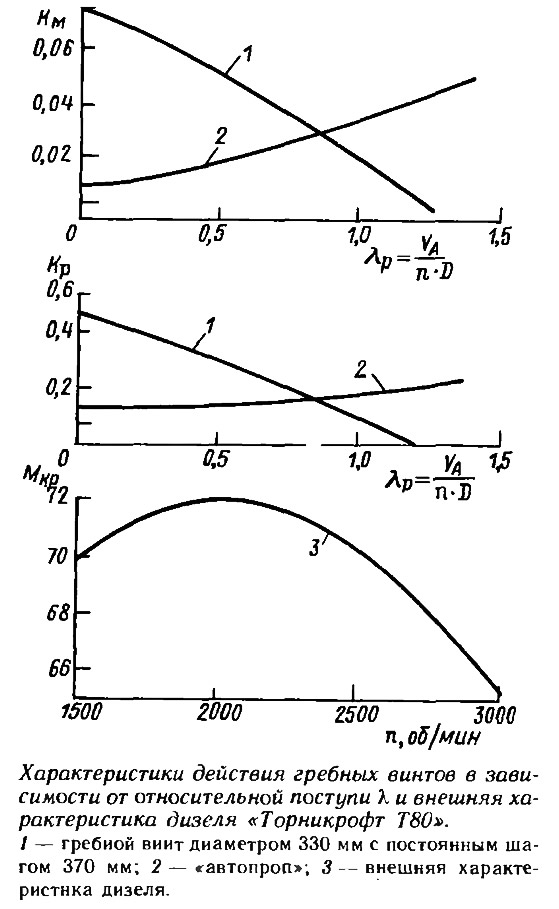
Характеристики действия гребных винтов в зависимости от относительной поступи
Поскольку упор «автопропа» на малой скорости оказывается ниже, чем обычного винта, то для разгона судна с «автопропом» со «стопа» до полной скорости требуется несколько большее время. Например, упомянутая яхта «Мьюди-346» с обычным винтом развивала скорость 6,5 узлов за 25 секунд, с «автопропом» лаг фиксировал ее через 35 с. В этот период двигатель с таким винтом может развивать полные обороты без риска перегрузки его вращающим моментом. Это свойство позволяет совершать филигранные маневры в тесных гаванях, давая судну толчки вперед — назад не снижая частоты вращения двигателя. Примечательно, что судно с «автопропом» практически не проявляет эффекта заноса кормы в сторону в начальные моменты работы винта, который судоводители широко используют для того, чтобы прижать или отжать корму от причала. Ведь в эти моменты лопасти «автопропа» разворачиваются в положение минимального шага — в плоскость вращения винта.
Главным же достоинством «автопропа» при маневрировании является феноменальный упор на заднем ходу (см. схему сил и скоростей). Это особеиио важно при экстренной остановке судна реверсированием с полного переднего хода на задний. На испытаниях 5-тонная яхта, идущая 6,5-узловым ходом, полностью останавливалась, пройдя с момента включения заднего хода всего одну длину корпуса! Если изобразить картину скоростей на лопасти «автопропа», когда он работает на задний ход, а судно еще продолжает движение вперед, то можно обнаружить, что сила F отклоняется в сторону входящей кромки лопасти. При этом подъемная сила Y дает поперечную составляющую, направленную в сторону вращения гребного вала, то есть помогающую двигателю вращать винт. Благодаря этому двигатель работает легко и мягко в отличие от установки, снабженной винтом фиксированного шага.
Характерно, что если не застопорить гребной вал на ходу под парусами, то «автопроп» вращается в ту же сторону, что и при работе двигателя на заднем ходу. Винты фиксированного шага в таких случаях всегда сохраняют «свое» нормальное вращение — как на переднем ходу. Для снижения сопротивления движению яхты необходимо гребной вал застопорить, тогда лопасти «автопропа» автоматически разворачиваются во флюгерное положение.

«Автопроп» является отличным движителем при комбинированном плавании — под парусом и мотором. В таких случаях двигатель работает на частичных режимах — при 25—40% номинальных оборотов, а работа винта характеризуется большой относительной поступью, превышающей λ=1,0. Как видно из графиков зависимости упора винта от λ, «автопроп» при таком значении поступи дает более высокий упор, чем обычный винт и, следовательно, обеспечивает более заметный прирост скорости судна.
«Автопроп» еще только начинает внедряться на малом флоте. Основная область применения таких винтов — сравнительно тяжелые катера водоизмещающего типа, для которых характерна многорежимная эксплуатация (с нагрузкой и без нее, с рыболовными сетями и при выходе на промысел порожнем и т.п.).