
В отличие от парусов, которые на протяжении тысячелетий верно служат человеку, история знает лишь отдельные эпизоды использования энергии морского волнения для движения судов.
В 1936 г. в рецензии на статью профессора Г. Е. Павленко «Использование энергии качки на волнении для движения судов» академик А. Н. Крылов писал:
«Я припоминаю, что в старинных описаниях плаваний китобойных судов (может быть даже у Скоресби) сообщается, что мертвый кит, лежащий в разрез волн, совершая как бы «килевые» качания, имеет заметный ход.
В 1902 г. доктор медицины лейтенант флота А. С. Боткин донес рапортом бывшему тогда управляющему морским министерством адмиралу Ф. К. Авелану о лодке, снабженной плавниками, которая без всяких иных приспособлений плавала по Неаполитанскому заливу, развивая при благоприятных обстоятельствах ход до 3—4 уз. Боткин предлагал использовать это приспособление для весьма малых подводных лодок.
По приказанию адмирала Авелана в бассейне были произведены некоторые предварительные испытания на моделях; затем Боткин приспособил гибкие, в виде рыбьего хвоста, плавники к канадскому челноку и пробовал его на озере Малоярви.
Затем он на собственный счет построил деревянную полуподводную лодку, водоизмещением около 10 т, приспособил к ней плавники, но обстоятельных испытаний не произвел...»
Информация об изображении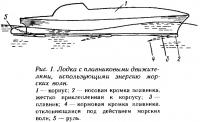
Рис. 1. Лодка с плавниковыми движителями, использующими энергию морских волн
Лодка, о которой сообщал А. С. Боткин, по-видимому, была похожа на изображенную на рис. 1, воспроизводимом из американского патента № 3453981, опубликованного в 1969 г. Движитель этой лодки представляет собой эластичные плавники с жесткой ведущей кромкой и гибкой задней частью. При волнении под воздействием качки лодки и вертикальных колебаний воды плавники совершают колебательные движения, создавая тягу, которая движет лодку вперед.
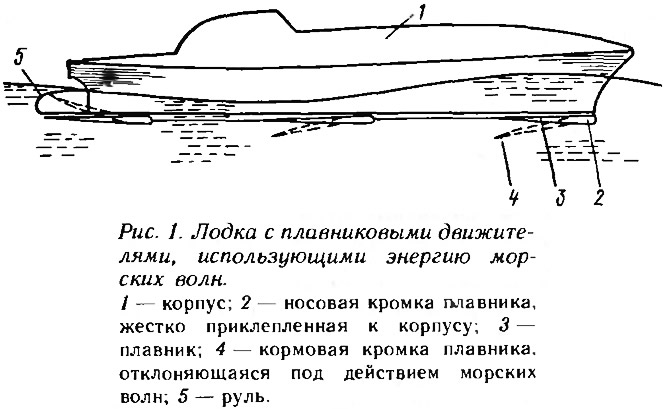
Рис. 1. Лодка с плавниковыми движителями, использующими энергию морских волн
Для движения судов энергия морских волн пока, к сожалению, практического применения не нашла. Можно лишь вспомнить серфинг — катание на досках по волнам прибоя да «оседлывание» попутной волны яхтами, вот, пожалуй, и все.
В чем же дело? Ведь энергия морских волн сродни энергии ветра: она всегда «под рукой», ее запасы не надо возить за собой в цистернах или бункерах, она экологически чиста и менее опасна в эксплуатации, чем, например, энергия пара, не говоря уже об энергии атома.
Почему же Человек, который вот уже более 5 тысячелетий успешно использует парус, до сих пор не сумел запрячь морскую волну? Ведь некоторые обитатели морских просторов, например дельфины, используют волну, причем не только просто «скатываясь» с ее склона — они используют ее энергию и для ускорения своего движения.
Нельзя ли подобным образом ускорять движение созданных человеком плавучих средств или же экономить другие энергетические ресурсы, например дизельное топливо?
Нельзя сказать, что изобретатели не занимаются проблемой получения тяги, которая двигала бы судно за счет энергии морских волн. Об этом свидетельствуют многочисленные патенты, опыты с моделями и натурными испытаниями малых судов.
На рис. 2 показана схема конструкции судна, состоящего из двух частей, которые соединены между собой при помощи шарнира — горизонтальной оси 8. Судно снабжено поршневым гидронасосом, цилиндр 3 которого закреплен на кормовой части корпуса, а шатун 5 одним концом шарнирно соединен с носовой частью, а другим — со штоком 4 поршня. Под действием килевой качки обе части корпуса совершают угловые перемещения относительно друг друга, в результате чего шток поршня совершает рабочие ходы, нагнетая рабочую жидкость в гидроаккумулятор, откуда она поступает на гидромотор, приводящий во вращение гребной винт.
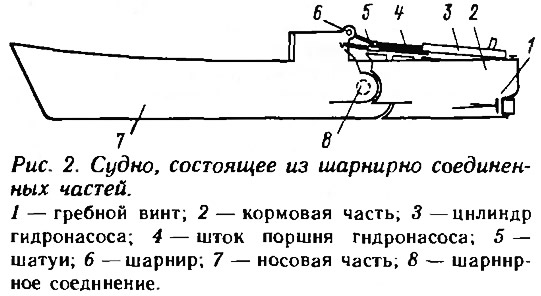
На рис. 3 предлагается использовать энергию бортовой и килевой качки при помощи маятника, подвешенного внутри корпуса судна. Верхний конец маятника шарнирно соединен со штоками 2 четырех гидронасосов 5, которые, в свою очередь, шарнирно соединены с корпусом судна. Поперечные и продольные колебания маятника преобразуются в рабочие ходы поршней 4 гидронасосов, из которых рабочая жидкость поступает сначала в гидроаккумулятор, а затем на гребной гидромотор.
Предлагаются и такие технические решения, когда подвешенный на горизонтальном валу маятник, выполненный, например, в виде сектора, при помощи зубчатой передачи и обгонной муфты, которая передает вращение только в одном направлении, приводит в действие электрогенератор. Вырабатываемая им электроэнергия используется для привода гребного электромотора и питания судовых потребителей.
Преимущества таких установок в том, что они относительно просты по конструкции, в них можно применить широко распространенные в технике агрегаты — гидро- и электроприводы. А наиболее существенными их недостатками являются большие массы и габариты маятников, низкий КПД, что объясняется многократным преобразованием энергии в ее различные виды.
В определенных условиях более экономичными могут оказаться волновые двигатели-движители, содержащие поплавок, который приводится в движение, следуя за профилем волны. Поплавок 4, например, может передавать колебания через систему рычагов 7 и 5 плавниковому движителю 6 (рис. 4).
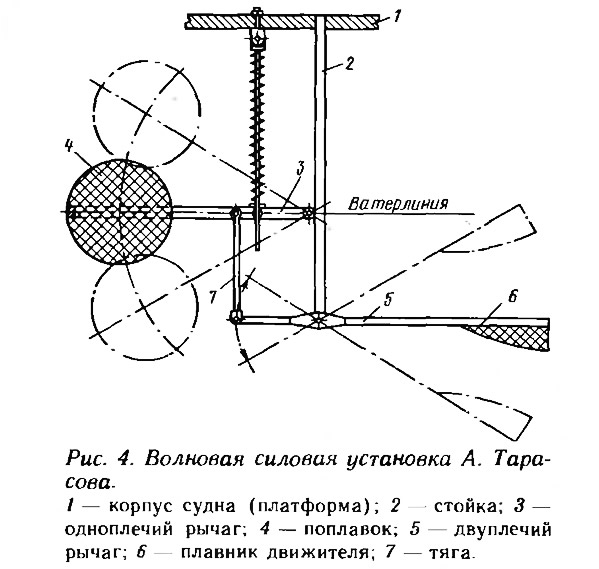
Волнодвижители поплавкового типа могут успешно использоваться при малых скоростях движения плавсредств, например, для удержания в заданной точке плавучих платформ, обеспечивая это без затрат топлива. Использование таких движителей на скоростных судах — маловероятно, так как с повышением скорости резко возрастает гидродинамическое сопротивление поплавков.
Наиболее перспективными являются, по-видимому, волновые движители крыльевого типа. Принцип работы такого движителя рассмотрим на примере установки, показанной на рис. 5. Она состоит из рельсов 3, неподвижно закрепленных над поверхностью взволнованного моря (например. на сваях), по которым может перемещаться тележка 2. На нижнем конце кронштейна 4, закрепленного к тележке, установлено подводное крыло симметричного профиля, которое может поворачиваться в вертикальной плоскости.
Будем считать, что движение частиц воды происходит в морской волне по круговым орбитам, в вертикальной плоскости. Пусть в точке А1 вектор скорости U частиц воды направлен вертикально вниз. Повернем крыло вокруг горизонтальной оси , носовой кромкой вверх и установим его под некоторым углом атаки к вектору скорости U. На крыле возникнет подъемная сила У, в данный момент направленная справа налево. Эта сила — волновая тяга — потянет тележку влево. (Силу гидродинамического сопротивления крыла, которая существенно меньше подъемной силы У, для простоты во внимание принимать не будем.)
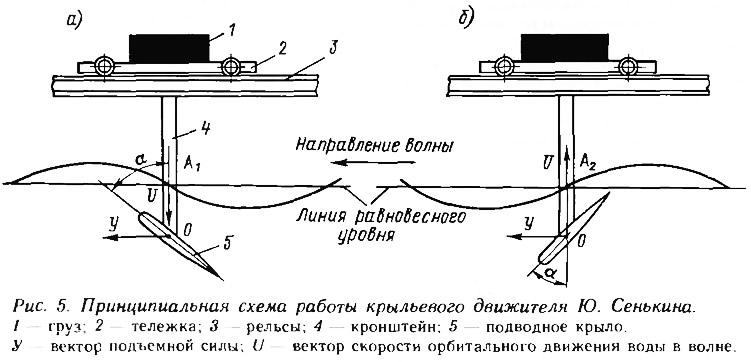
В точке А2, которая сдвинута относительно точки А1 на половину длины волны и находится на восходящем склоне гребня, вектор скорости орбитального движения частиц воды в волне оказывается направлен вертикально вверх. Если повернуть крыло носовой кромкой вниз и установить его с углом атаки к вектору скорости U, то на нем возникнет подъемная сила У, которая направлена влево, то есть по ходу тележки, который она получила в первом случае.
Таким образом, используя вертикальные перемещения частиц воды при ее орбитальном движении, можно получать на крыле волновую тягу, движущую тележку (судно) в заданном направлении. Необходимо только ориентировать переднюю кромку крыла навстречу вертикальной составляющей скорости U движения частиц воды под некоторым углом атаки и в направлении движения тележки.
При горизонтальном направлении вектора скорости орбитального движения воды и установке крыла в плоскости потока подъемная сила на крыле не возникает, а тяга равна нулю.
В описанном движителе плавникового типа происходит преобразование кинетической энергии орбитального движения воды в волне непосредственно в тягу, а значит такой движитель имеет более высокий КПД, чем у рассмотренных выше Так как скорости орбитального движения воды в волне достигают максимума вблизи поверхности и уменьшаются с глубиной1, наиболее эффективным оказываются плавники-крылья, расположенные на небольшом углублении.
Однако, в отличие от тележки, судно на ходу не может опираться на неподвижно закрепленные рельсы и поэтому при волнении подвергается качке, при которой оно перемещается вместе с волновым профилем. В результате происходит уменьшение вертикальной составляющей скорости воды, натекающей на крыло (в определенных условиях она может снизиться до нуля), а следовательно, уменьшается и волновая тяга. Поэтому описанный выше способ окажется эффективным прежде всего на судах и плавсредствах, мало подверженных качке (суда с малой площадью ватерлинии, имеющие достаточно заглубленные корпуса, супертанкеры, полупогруженные суда и т. д.).
На обычных судах, которые в значительной степени подвергаются качке, целесообразно использовать не непосредственно кинетическую энергию орбитального движения воды, а энергию качки судна — кинетическую энергию колебательного движения судна относительно воды. В этом случае судно передает энергию качки подводному крылу-движителю, на котором эта энергия преобразуется в тягу.

Конструктивно такой движитель может быть выполнен в виде подводного крыла, закрепленного на подпружиненном относительно корпуса судна кронштейне (рис. 6). При показанном на эскизе расположении крыло будет работать в маловозмущенных слоях воды, т. е. там, где скорость орбитального движения воды при волнении незначительна.
Пусть судно движется со скоростью V и испытывает качку, поперечную или продольную (рис. 7). За счет качки крыло получит вертикальную скорость U, а вектор истинной скорости набегающего на крыло потока воды будет
Информация об изображении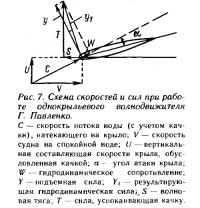
Рис. 7. Схема скоростей и сил при работе однокрыльевого волнодвижителя Г. Павленко
Под действием этого потока крыло отклонится от горизонтального положения и будет стремиться встать во флюгерное положение. Однако пружины, сжимаясь будут препятствовать этому. В результате крыло займет некоторое промежуточное положение под углом атаки α к набегающему потоку. На крыле возникнет подъемная сила У, направленная наклонно вперед. Сложенная с силой сопротивления W, подъемная сила образует результирующую гидродинамическую силу У|. Теперь представим эту силу в виде двух составляющих S и Т. Первая из них направлена горизонтально и есть не что иное, как волновая тяга. Сила Т направлена вертикально, в сторону, противоположную направлению вектора скорости U (движение крыла, обусловленное качкой). Таким образом, сила Т будет препятствовать росту скорости U, т. е. будет успокаивать качку.
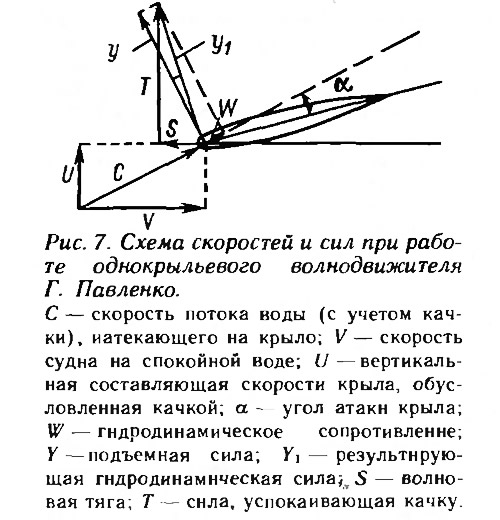
Рис. 7. Схема скоростей и сил при работе однокрыльевого волнодвижителя Г. Павленко
Пропульсивный КПД этого движителя оказывается ниже, чем движителя крыльевого типа, использующего непосредственно энергию орбитального движения воды при волнении, поскольку до 85 % энергии морских волн теряется при ее преобразовании в энергию качки судна.
В приведенном примере установка угла атаки крыла движителя к набегающему потоку происходит автоматически при помощи пружин. Предлагается также двухкрыльевой волнодвижитель, у которого одно вспомогательное крыло является управляющим, работающим, как флюгер. Оно служит для установки главного — тягового крыла под нужным углом атаки.
Информация об изображении
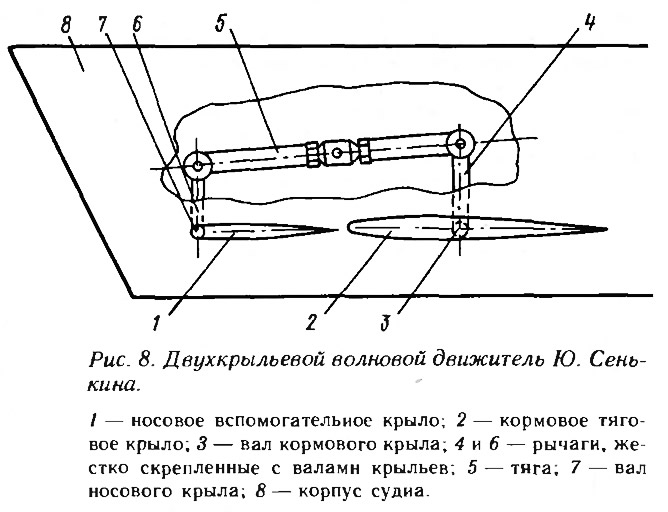
Рис. 9. Двухкрыльевой волновой движитель с кормовым крылом изменяемого профиля
На рис. 8 показан вариант такого движителя, у которого носовое крыло 1 выполнено по типу флюгера, расположенным в корму относительно горизонтального вала 7. Центр давления кормового крыла 2 приблизительно совпадает с осью вала 3, поэтому для поворота крыла на небольшой угол не требуется значительных усилий. Валы крыльев кинематически связаны между собой рычагами 4 и 6 и тягой 5. Благодаря тому, что рычаг 6 короче рычага 4, крыло 2 поворачивается на меньший угол, чем крыло 1, которое работает как флюгер. В результате крыло 2 устанавливается под углом атаки к набегающему потоку. Подъемная сила на крыле 2 периодически бывает направлена либо вперед-вверх, либо вперед-вниз, при этом ее горизонтальная составляющая — волновая тяга, хотя и изменяется по абсолютной величине, но всегда бывает направлена вперед по ходу судна.
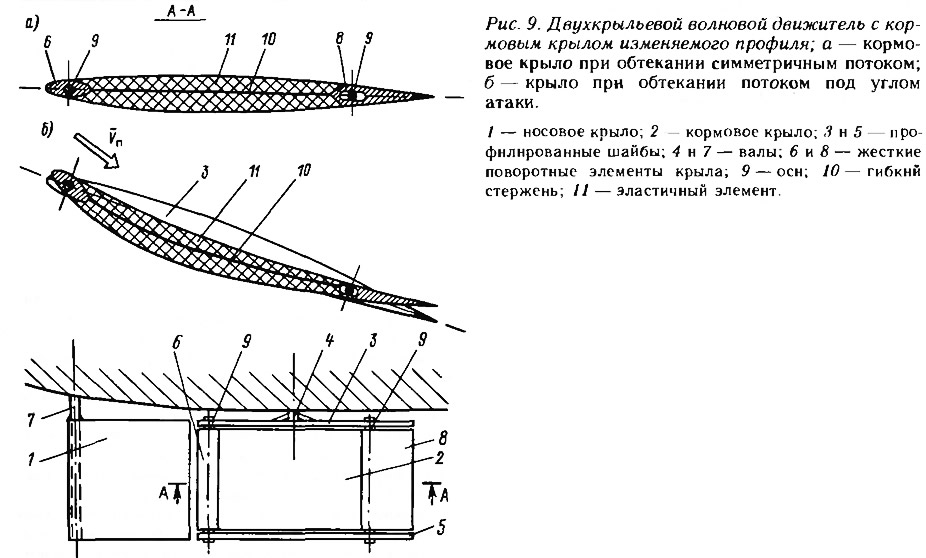
Рис. 9. Двухкрыльевой волновой движитель с кормовым крылом изменяемого профиля
Если тяговое крыло выполнить таким образом, что под действием набегающего потока оно будет изменять свой профиль, становясь выпукло-вогнутым в ту или иную сторону в зависимости от направления набегающего потока, то пропульсивный КПД движителя существенно повысится. Вариант конструкции такого крыла показан на рис. 9.
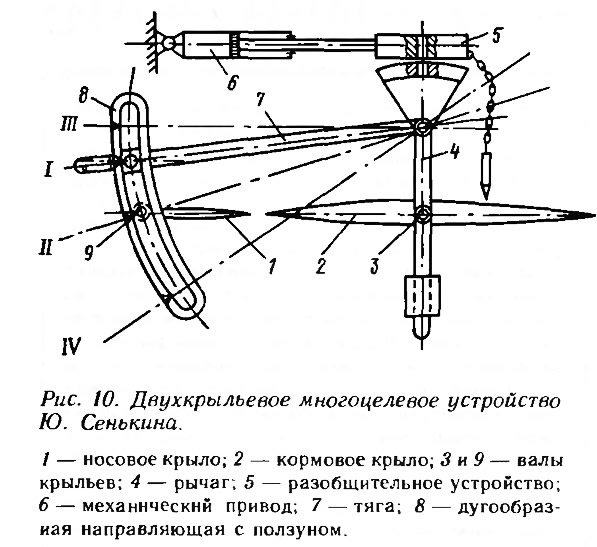
В двухкрыльевой схеме волнодвижителя можно менять передаточное отношение от носового крыла к кормовому и тем самым менять угол атаки тягового крыла с учетом многих факторов, характеризующих плавание судна (скорость судна, амплитуда волны, предельно допустимый угол качки и т. д.). Автор разработал принципиальную схему такого движителя (рис. 10), возможные варианты использования которого представлены на рис. 11. Роль рычага носового управляющего крыла в этом устройстве выполняет направляющая 8, которая своей срединной частью жестко соединена с валом 9. Устройство дополнительно снабжено приводом 6 (механическим или ручным) для принудительного поворота крыла 2, а также разобщительным устройством 5. Тяга 7 снабжена ползуном, который скользит по направляющей 8.
При положении тяги в пределах, ограниченных прямыми линиями II—III, обеспечивается регулирование передаточного отношения при работе устройства в режиме волнодвижителя (рис. 11, а).
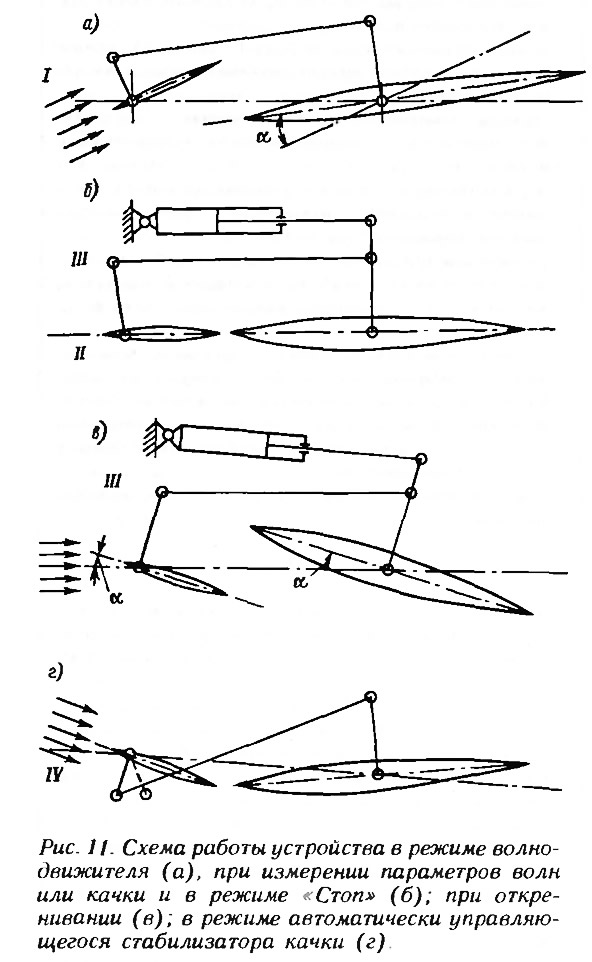
Если установить тягу 7 в положение II, кормовое крыло будет застопорено в горизонтальном положении, тяга при этом не создается (режим «Стоп»), Носовое крыло, продолжая работать во флюгерном режиме, может быть использовано для измерения параметров волны или качки, если его вал 9 соединить с соответствующими измерительными приборами.
В положении III, соединив крыльевую систему с приводом 6 посредством разобщительного устройства 5, можно поворачивать носовое и кормовое крылья на равные углы. Это может потребоваться, например, на паруснике, для устранения крена. Устройство может работать и как движитель, создавая тягу или успокаивая качку при помощи обоих крыльев при ручном или механическом управлении ими.
При переводе тяги 7 в положение IV устройство будет автоматически успокаивать качку (без создания тяги).
Можно повысить пропульсивный КПД волнового движителя и эффективность успокоения им качки, если передаточное отношение между крылом-датчиком и тяговым крылом изменять по заданной программе при помощи автоматической системы управления (АСУ).
Расчеты показывают, что волновые движители крыльевого типа могут эффективно работать при скоростях хода судна от нуля до 40 уз, а успокаивать качку — при всех доступных ныне скоростях.
А что делать с крыльями волнодвижителя в штиль? Ведь в этом случае они будут не только создавать дополнительное гидродинамическое сопротивление, но и станут помехой для окружающих судов, для самого судна при плавании в узкостях, швартовке и т. д.
Во-первых, крылья можно убирать, втягивая или заваливая внутрь специальных ниш в корпусе судна, подобно тому, как убираются подводные крылья успокоителей качки. Можно вообще поднимать крылья из воды, если их стойки в верхней части шарнирно соединить с корпусом судна.
А во-вторых, крылья при отсутствии волнения можно использовать в качестве плавникового движителя подобно тому, как это предложил норвежец Э. Якобсен. В его движителе подводное тяговое крыло шарнирно закреплено на нижнем конце вертикального штока, который может совершать вертикальные перемещения, выдвигаясь или поднимаясь внутрь корпуса судна при помощи механизма, работающего от главного двигателя. Угол атаки крыла к набегающему потоку ограничивается фиксаторами, которые позволяют крылу отклоняться только на строго заданный угол Этот движитель может работать, используя одновременно или порознь энергию морских волн и энергию судового двигателя. Такие движители могут успешно применяться на морских и озерных судах в целях экономии топлива и увеличения дальности плавания. Совершенно новые удивительные свойства они придают судам-ветроходам, единственным способом движения которых навстречу ветру является лавировка, т. е. движение галсами под углом навстречу ветру. При этом скорость продвижения парусника в направлении прямо против ветра относительно невелика.
Судно, снабженное волновым движителем, на курсе навстречу волне использует наибольшее количество энергии морских волн. Поэтому если парусник снабдить волновым движителем, то при острых курсовых углах к ветру целесообразно убрать паруса и идти навстречу волнам и ветру, используя тягу волнового движителя. «Ветроволноход» способен идти и при отсутствии ветра, если на море имеются волны, например, мертвая зыбь.
Способность волнового движителя крыльевого типа увеличивать тягу при движении навстречу волне поможет сэкономить топливо при штормовых переходах, когда сопротивление движению судна существенно повышается. Шторм будет способствовать увеличению тяги волнодвижителя, разгружая гребной винт и главный двигатель.
В «Основных направлениях экономического и социального развития СССР на 1986—1990 годы и на период до 2000 года» поставлена задача обеспечить в 1990 г. по сравнению с 1985 г. экономию органического топлива в количестве 200—230 млн. т, из них 75—90 млн. т — за счет атомной энергии и энергии возобновляемых источников. Одним из дополнительных источников энергии являются и морские волны, которые уже в ближайшем будущем могут быть использованы для повышения экономических показателей эксплуатации флота.
Список использованной литературы
- 1. Г. Е. Павленко. Использование энергии качки на волнении для движения судов. Ж. Судостроение, № 6, 1936 г.
- 2. В. П. Сочивко, Очерки бионики моря, Л., Судостроение, 1968 г.
- Авторские свидетельства СССР:
- 3. 47562, кл.В63 Н 19/02, 1935 г., опублик. 30.06.36, автор Г. Е. Павленко.
- 4. М 592671, кл.В63 Н 19/02, 1974 г., БИ М 6, 1978 г., автор Ю. Ф. Сенькин.
- 5. № 962097. кл.В63 Н 19/02, 1980 г., БИ № 36, 1982 г., автор А. А. Тарасов.
- 6. М 1093621, кл.В63 Н 19/02, 1982 г., БИ М 19, 1984 г., автор Ю. Ф. Сенькин.
- 7. № 1105389. Кл.В63 Н 19/02, 1983 г., БИ № 28. 1984 г., автор А. А. Тарасов.
- 8. № 1131770, Кл.В63 Н 19/02, 1983 г., БИ М 48, 1984 г., автор Ю. Ф. Сенькин.
- Заявки ФРГ:
- 9. № 1238800, кл.В63 Н 19/02, опублик. 1967 г.
- 10. № 3109446, кл.В63 Н 19/02, опублик. 1982 г.
- 11. А. Н. Холодилин, А. Н. Шиврев. Мореходность и стабилизация судов на волнении. Л., Судостроение. 1976 г.
- 12. Патент США № 3453981, опублик. 1969 г.
- 13. Журнал ПНР «Може», № 3, 1984 г., с. 28.
Примечания
1. На глубине, равной половине длины волны, скорость орбитального движения воды в 23 раза меньше, чем у поверхности, а на глубине, равной длине волны, эта скорость практически равна нулю.