
Из письма читателя
Новый «Запорожец» расходует 4.6 литра бензина на 100 км; экспериментальный автомобиль «Ситроен ЭКО-2000» — 2,3 л. Пятьдесят лет тому назад в КБ А. Н. Туполева был создан самолет «РД-25», на котором Чкалов и Громов совершили рекордные перелеты. Этот самолет при стартовом весе 11 т расходовал 50 л на 100 км при скорости 180 км/ч!
На фоне этих цифр расход топлива 35—50 л на 100 км, что мы имеем на открытой глиссирующей мотолодке с подвесным мотором (и 55—65 л/100 км у лодки с каютой), просто пугает своей разорительной неэкономичностью. Каковы возможности снижения этих цифр?
Попытаемся проанализировать: каковы перспективы повышения экономичности эксплуатации моторных лодок — наиболее универсальных и массовых в нашей стране судов, рассчитанных на полезную нагрузку 300—400 кг (3—4 человека) и скорость движения 30—40 км/ч.
Прежде всего, от чего зависит расход топлива? Аналитическая зависимость, по которой можно определить расход, достаточно простая:

где D — вес мотолодки с полезной нагрузкой, кг;
g — удельный расход топлива, кг/л.с.·ч;
η — общий пропульсивный КПД движителя, учитывающий КПД винта и потери упора за счет сопротивления подводной части подвесного мотора;
К — гидродинамическое качество — коэффициент, показывающий, во сколько раз сила сопротивления воды движению лодки меньше силы веса;
γ — удельный вес топлива, кг/л.
Очевидно, что существенного повышения экономичности за счет снижения массы корпуса мотолодки и повышения пропульсивного КПД достичь невозможно. Масса корпуса и мотора современной мотолодки составляет 40—50% ее полного водоизмещения. Если даже и удастся уменьшить ее на 20—30% (а для этого необходимо переходить на новые материалы, другую технологию), это снизит путевой расход горючего всего на 6—15%. Общий пропульсивный КПД современного подвесного мотора достигает 50—55%. За счет повышения передаточного отношения редуктора и отработки формы подводной части мотора эту величину можно увеличить до 60—65% (на скоростях 30—40 км/ч), что повысит экономичность на 20%, но при этом несколько увеличится вес и габариты мотора.
Гидродинамическое качество современных мотолодок составляет К=5÷6,5. Пожертвовав мореходностью лодки, его можно повысить только до 7—7,5.
Гораздо большие резервы повышения экономичности можно найти, переведя мотолодку в качественно другой режим движения — на подводных крыльях или воздушной подушке, в полет с использованием эффекта экрана. Теоретически гидродинамическое качество мотолодки с глубокопогруженными управляемыми крыльями может достигать K = 16÷26 на скоростях 65—35 км/ч соответственно. Качество судов с малопогруженнымн крыльями и крыльями, пересекающими поверхность воды, ниже (К = 8÷13), хуже также и их мореходность. Условное значение гидродинамического качества для судов на воздушной подушке скегового типа (с учетом затраты мощности на привод подъема) также достаточно высокое (К = 15).

При относительно небольших скоростях (до 15—20 км/ч) становятся целесообразны водоизмещающие катамараны, качество которых достигает K = 10÷15 при высокой мореходности.
Удельный расход топлива большинства двухтактных современных ПМ составляет g = 360÷390 г/л. с.·ч. Однако двухтактный двигатель очень чувствителен к режиму работы, изменению нагрузки, регулировке. Поэтому в реальных условиях эксплуатации удельный расход топлива превышает 400 г/л.с.·ч.
Более экономичны четырехтактные двигатели (g = 220÷250 г/л.с.·ч.), причем расход топлива у них меньше изменяется в зависимости от условий эксплуатации.
Современные высокооборотные дизельные двигатели расходуют 180—220 г/л.с.·ч. Однако высокий вес, сложность запуска делают эти двигатели неперспективными для мотолодок. Иное дело — так называемые адиабатические двигатели.
В современных ДВС количество тепла, которое отводит система охлаждения, близко по величине к теплу, затраченному на полезную работу. Как известно, количество тепла, поступающего в стенки камеры при прочих равных условиях, пропорционально разности температур газа и стенок. У современных двигателей температура головки блока, поршня, цилиндра не превышает 300 °С, в то время как средняя температура газов в цилиндре в течение такта близка к 1000 °С. Если эти детали выполнить из жаропрочной керамики, то вследствие малой теплопроводности материала они нагреются практически до средней температуры газов и тепловые потери практически исчезнут. Такой двигатель может работать без принятой в настоящее время системы охлаждения, а удельный расход топлива его теоретически может составлять 60% от расхода существующих ДВС. Опытные образцы таких двигателей уже созданы за рубежом и у нас в стране.
Воспользуемся теперь приведенной выше зависимостью для расчета расхода топлива мотолодки на 100 км пути для различных способов движения и двигателей. Полное водоизмещение мотолодки Примем равным 700 кг, расчетную скорость — 30—40 км/ч.
Итак, по экономичности и эксплуатационным качествам весьма перспективной представляется мотолодка на глубокопогруженных управляемых крыльях.
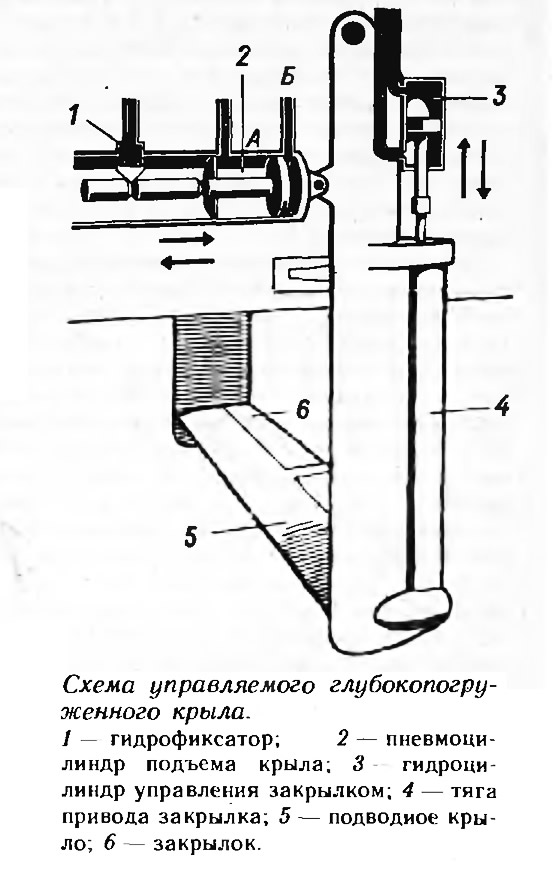
Попытаемся представить себе конструкцию такой лодки. Подводные крылья должны быть обязательно откидной конструкции, так как габаритная осадка на стоянке 0,7—0,8 м явно велика (осадка на ходу 0,4—0,45 м). Откидываться крылья должны и при встрече с препятствием. Кормовое крыло может откидываться за транец, носовое — убираться в специальную нишу-редан, который также улучшает выход мотолодки на подводные крылья.
Во избежание поломок крылья должны откидываться не самими препятствиями, а принудительно, причем скорость их откидывания должна быть больше скорости движения лодки. Если этого не сделать, то крыло, которое по инерции может глубоко войти в препятствие (например, в топляк), при откидывании будет увлекать его вверх, что несомненно приведет к изгибу и поломке крыла. Аварийное откидывание, как и подъем крыла при подходе к берегу, лучше всего производить при помощи пневмоцилиндра с гидрозамком. Правда, для этого необходим гидронасос (он потребуется и для управления закрылками), а также маломощный компрессор с электрическим или гидравлическим приводом.

В момент выхода на крылья закрылки устанавливаются в положение максимальной подъемной силы. Выход на крылья происходит на скорости 25 км/ч, при этом потребная мощность составляет 20 л. с. При движении в крыльевом режиме потребная мощность падает до 5—6 л.с. При этом необходимо увеличить шаг винта в 2,1—2,2 раза.
Подвесной мотор крепится к специальному кронштейну, который при помощи гидроцилиндра может перемещаться вверх-вниз на 300 мм. Для управления закрылками можно использовать схемы, аналогичные устройствам для управления курсом судна. В этих схемах основной управляющий сигнал пропорционален разности углов заданного курса и действительного. Чем больше эта разность, тем на больший угол отклоняется руль, под действием которого судно поворачивает на требуемый курс. В тот момент, когда действительный курс совпадает с заданным, руль возвращается в диаметральную плоскость. Однако судно приобретает к этому моменту угловую скорость и по инерции «проскакивает» заданный курс. Квалифицированный рулевой чувствует судно и при подходе к заданному курсу заранее «одерживает» судно, перемещая руль в обратном направлении. Для того, чтобы автоматическая система управления так же смогла «одерживать» судно и исключить движение «змейкой», в ней должны учитываться угловые скорости поворота и даже угловые ускорения.
Для катера на подводных крыльях необходимы три подобных устройства: для управления погружением носового и кормового крыльев и управления креном. Управление креном может осуществляться двумя — правым и левым — закрылками, которыми оборудуется одно из крыльев. При крене закрылки поворачиваются в разные стороны. Для работы такой системы необходимы акустические датчики глубины погружения крыльев, акселерометры, гироскоп. Сигналы от этих датчиков усиливаются, складываются и подаются на специальный электромагнит, который управляет гидравлическим распределительным устройством, подающим рабочую жидкость в ту или другую полость гидроцилиндров, управляющих закрылками. В настоящее время разработаны самонастраивающиеся схемы, которые позволяют поддерживать автоматически оптимальное управление при изменяющихся условиях (изменение нагрузки и центровки, волнение и т. п.). Для этого к схеме управления придется добавить новые функциональные блоки.
При достаточно высокой точности датчиков и высоком быстродействии исполнительного механизма подобная система сможет управлять мотолодкой на волне, практически полностью исключая качку, но до тех пор, пока высота волны не сравняется с высотой стоек крыла. При большей волне мотолодка начнет испытывать удары корпусом о вершины волн. Но если заранее известны размеры волны, то можно таким образом организовать управление крыльями, чтобы при прохождении впадины крылья почти выходили на поверхность воды, а при прохождении вершины приподнимали корпус, чтобы исключить соударение его с волной. Это приведет к необходимости добавления новых функциональных блоков, схема получится громоздкая и ненадежная.
Выручить могут цифровые методы на базе малогабаритных универсальных микропроцессоров. В этой системе сигналы, поступающие с датчиков в виде напряжения, пропорционального значению контролируемой величины, превращаются в цифровые, дискретные.
Через определенные промежутки времени (около 0,01 сек) эти числа вводятся в процессор, где по заранее разработанной программе — алгоритму обрабатывается полученная информация и определяется значение управляющего сигнала, опять-таки в цифровом виде. Далее цифровой сигнал преобразуется в аналоговый и в виде напряжения поступает на управляющий электромагнит.
Высокая точность, способность запоминать большой объем информации, простота перенастройки при изменении программы — основные преимущества цифровых схем на базе микропроцессоров. В настоящее время в промышленности для управления технологическими процессами используются ремиконты — универсальные высоконадежные микропроцессоры, в память которых уже заложен целый набор законов управления (т. е. весьма сложных программ). Подключение необходимого закона или их сочетания происходит при помощи дополнительного пульта.
В настоящее время выпускается микро-ЭВМ БК 0010 — бытовой компьютер, быстродействие которого достаточно для наших задач. Размером с дипломат и стоимостью 550 руб. такая микро-ЭВМ в принципе уже сейчас может быть установлена на катере. Правда, в отличие от ремиконта в ней отсутствуют блоки преобразования аналогового сигнала в цифровой и обратно.
Бурное развитие микроэлектроники позволяет надеяться, что в ближайшем будущем будут созданы еще менее габаритные и дешевые быстродействующие универсальные управляющие микро-ЭВМ, которые могут быть использованы и для управления мотолодкой на крыльях. Установив дополнительный датчик в районе форштевня, можно измерять высоту подходящей волны. А если в памяти ЭВМ имеются и размеры предыдущей волны, то можно разработать алгоритм, который с достаточной вероятностью определит полные размеры подходящей волны. Если ее высота будет больше предельной, то ЭВМ изменяет закон управления таким образом, чтобы предотвратить удар корпуса о вершину волны. Естественно, что в этом случае возникнет вертикальная и килевая качка. Однако ускорения при этом не будут превышать 1,5 g (g = 9,81 м/с2 — ускорение свободного падения), что значительно меньше, чем у глиссирующих мотолодок.
Возможно, что крылатая мотолодка, снабженная электронной системой управления, будет преодолевать волну высотой 1,0—1,5 м. Быстродействующая бортовая ЭВМ с достаточно большой памятью позволит автоматизировать управление шагом гребного винта и опережением зажигания, создать систему активного контроля за параметрами работы двигателя, решать задачи навигации и многое другое.
Поскольку мотолодка на глубокопогруженных подводных крыльях имеет малое сопротивление воды, необходимо будет позаботиться о снижении аэродинамического сопротивления, так как при встречном ветре расход топлива может увеличиться в два и более раз. К слову сказать, такую мотолодку можно будет эксплуатировать и на сжиженном газе. Двух двенадцатилитровых баллонов суммарным весом 25 кг (стоимость заправки I рубль) хватит на 350 км!
Конечно, для владельца современной мотолодки, все системы которой (за исключением мотора) состоят из пяти тросов ДУ, нескольких защелок и пары тумблеров, гидропневмопривод, ЭВМ — могут показаться элементами из весьма далекого будущего. По-видимому, такие же чувства испытывали и автомобилисты 30-х годов, когда от тормозов с механическим приводом переходили на гидравлические тормоза с вакуумным (пневматическим) усилителем, рулевое управление тоже снабдили гидроусилителями. Многие автомобили сейчас оборудуются электроникой, управляющей системами регулирования дорожного просвета, антиблокировочными системами, системами управления опережением зажигания и дозировкой топлива.
Создание такой мотолодки — дело хоть и реальное, но не быстрое. Однако уже сейчас вполне реально построить крылатую мотолодку с расходом топлива 12—15 л на 100 км пути. На ней можно установить V-образные пересекающие поверхность крылья (средняя часть которых имеет авиационный профиль) или малопогруженное крыло с «чайкой». Размеры крыльев можно определить таким образом, чтобы на расчетной скорости 35—40 км/ч на крыльях реализовался коэффициент подъемной силы Су, соответствующий значению максимального качества (Су ~ 0,2÷0,25 — для сегментных участков; Су = 0,3÷0,4 — для аэродинамических профилей). Угол атаки крыла на ходу может изменяться вручную при помощи механической передачи (см. «КиЯ» №57) или гидропривода.
Двухтактный подвесной мотор придется заменить легким автомобильным двигателем (например, от «Запорожца») с угловой колонкой и винтом регулируемого шага.
Правда, на больших реках и озерах при высокой волне придется переходить на глиссирование или переходный режим движения с соответствующим увеличением расхода горючего. В этих условиях определенным преимуществом обладает крылатая мотолодка — катамаран, имеющая водоизмещающие обводы. При плавании на волнении на умеренных скоростях 15—22 км/ч расход топлива катамарана будет меньше, чем у глиссирующей мотолодки и практически не отличается от расхода топлива при движении на крыльях. Катамаран имеет высокие мореходные качества, мало чувствителен к перегрузкам, высокую живучесть; его можно эффективно использовать в виде моторного парусника.
Таковы реальные перспективы повышения экономичности малых моторных судов, над которыми уже сегодня должны работать судостроители. В равной степени это относится и к мотолодкам и катерам народнохозяйственного назначения и к прогулочно-туристским судам.
| Тип судна | Путевой расход, л на 100 км |
| Глиссирующая мотолодка с двухтактным ПМ | 48 |
| Глиссирующая мотолодка с четырехтактным ПМ и винтом повышенного КПД | 25 |
| Мотолодка с 4-тактным ПМ и малопогруженными подводными крыльями | 12 |
| Мотолодка на воздушной подушке скегового типа с 4-тактным ПМ | 12 |
| Мотолодка на управляемых глубокопогруженных крыльях с 4-тактным ПМ | 6 |
| Такая же мотолодка с адиабатическим двигателем | 4 |