
А нельзя ли неподвижные крылья заменить подвижными винтами? — подумал я. — Ведь опущенная в воду лопасть работающего винта-пропеллера практически представляет собою то же крыло.
Чтобы проверить идею, в течение года я построил несколько десятков моделей из дерева, проволоки и пластмассы. Сначала они лишь подпрыгивали, а двигались по воде, напоминая пауков-водомеров, очень неохотно. Однако от модели к модели движение их делалось все более уверенным, а попутно и у меня появилась убежденность в том, что новый принцип динамического поддержания судна на воде может оказаться жизнеспособным.
В апреле 1961 г. в Москву была послана заявка на изобретение2. Естественно, первый же эксперт категорически заявил, что такое сооружение никогда плавать не сможет. Пришлось везти в столицу очередную модель и запускать ее в умывальнике. Так или иначе, но прошло десять с небольшим лет — и 31 августа 1971 г. благодаря помощи эксперта Т. Е. Охотникова мне выдали авторское свидетельство на изобретение «Аппарат на подводных крыльях» за № 312788 (опубликовано в бюллетене № 26 31.VII 1971 г.)
Предмет изобретения в этом свидетельстве описан так: «Аппарат на подводных крыльях, содержащий корпус и попарно расположенные по бортам крыльевые комплексы, отличающийся тем, что, с целью уменьшения сопротивления, одновременного получения подъемной и движущей силы и обеспечения стабилизации судна, каждый крыльевой комплекс выполнен в виде вращающегося винта с несущими подводными крыльями-лопастями, диск вращения которого расположен наклонно к поверхности воды, а вал винта расположен в плоскости шпангоута и имеет привод вращения».
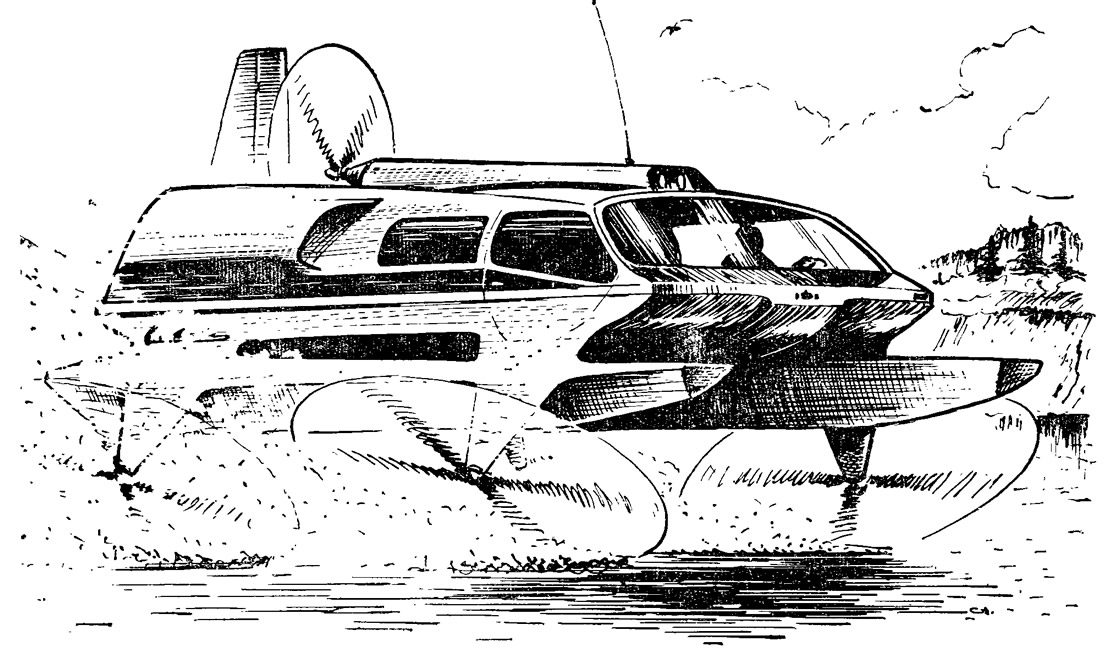
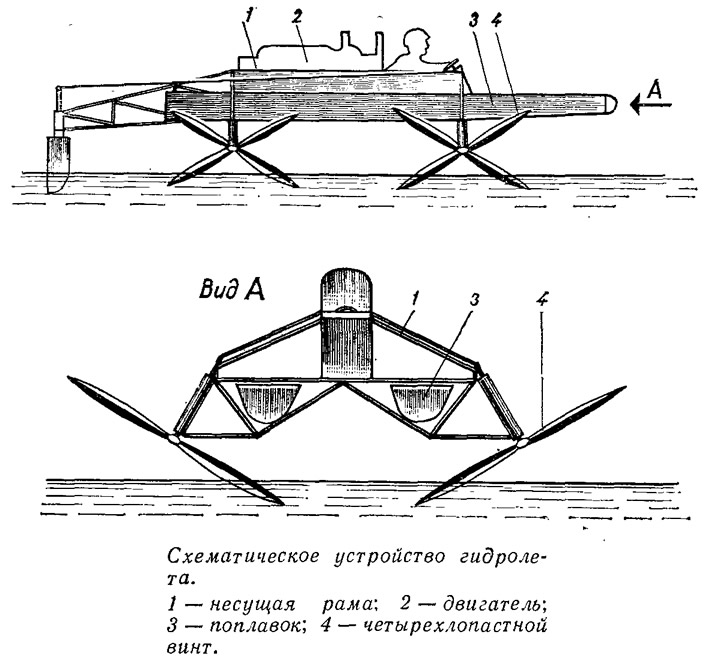
Поясним это «русским языком». На обычном СПК для динамического поддержания судна на ходу над водой ставят крылья, а для движения вперед — гребные винты. На моем же аппарате, названном гидролетом, и поддержание его и движение обеспечиваются одними и теми же элементами (винтами). Концевые участки узких лопастей частично погруженных винтов, похожих на самолетные воздушные винты-пропеллеры, поочередно пересекают свободную поверхность воды под некоторым углом. Именно на этих погруженных участках лопастей одновременно создаются и подъемная сила и упор, двигающий аппарат. Получается как бы вертолет «вверх ногами».
Важная особенность такой несущей системы в том, что скорость обтекания работающего участка лопасти (которая равна разности скорости движения судна и линейной скорости конца лопасти) может оставаться близкой к постоянной. Другими словами, скорость обтекания такого подводного крыла не обязательно равна скорости движения судна, — ее можно регулировать (например, с помощью установки дополнительного воздушного движителя). Это обстоятельство и позволяет избежать возникновения естественной кавитации на несущих поверхностях даже при самых высоких скоростях движения судна; скорость порядка 200 км/ч и выше становится реальной.
Долгое время все это было не более чем предположением. Чтобы убедиться в жизнеспособности идеи, надо было переходить от маленьких моделей к натурному аппарату, который можно было бы испытать на большой воде.
Четыре 12-сильных подвесных мотора, работавших на четыре винта, так и не смогли оторвать от воды самый первый гидролет. Второй его вариант с пусковыми устройствами уже начал «подпрыгивать», но упорно отказывался сдвинуться с места.
Лишь когда мне удалось раздобыть старенький, списанный со спортивного самолета двигатель «Вальтер-минор» с максимальной мощностью 140 л. с., очередной гидролет полетел. Это произошло в 1968 г., да и то не сразу. Оказалось очень трудно подобрать винты — их профиль, углы атаки, диаметр, углы установки относительно поверхности воды и частоту вращения. Так, самая первая серия винтов имела слишком маленький диаметр и чересчур большие обороты; винты стали засасывать воздух с поверхности и, естественно, оказались неэффективными.
Основные данные гидролета модели «81-5»

| Длина, м | 7,5 |
| Ширина, м | 5,6 |
| Высота, м | 2,0 |
| Масса полная, кг | 1000 |
| Мощность двигателя, л. с.: | |
| номинальная | 115 |
| максимальная | 140 |
| Диаметр винтов, м | 2,45 |
| Скорость, км/ч | 65 |
Надо признать, что конструкция даже пятого варианта гидролета «81-5», который испытывался с человеком на борту в сентябре 1981 г. на р. Урал под Магнитогорском, еще далека от совершенства. Дело в том, что параметры его винтов практически были выбраны по интуиции либо из конструктивных соображений. Так, профиль деревянных лопастей винтов выбирался не из условия получения наивысшего КПД, а из условия обеспечения их прочности. Делая эту пятую самоходную модель, я по-прежнему не считал своей целью получить готовый образец гидролета, пригодного к запуску в серию и эксплуатации. Важно было продемонстрировать принципиальную возможность создания транспортного средства нового вида. По этой простой причине конструкция, собранная из случайных подручных материалов, получила довольно странный вид.
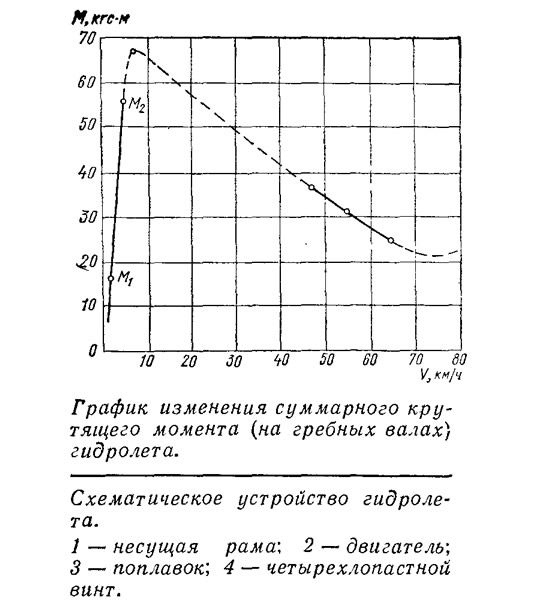
Пространственная несущая рама сварена из стальных труб. По ее бортам закреплены поплавки, сделанные из списанных лодок для академической гребли (восьмерок). Благодаря этим поплавкам гидролет остается на плаву при спуске на воду с берега (пока это можно делать только краном), перед началом движения, и после «посадки». В носовой части аппарата оборудовано место водителя; сразу же за ним расположен двигатель. В корме на раму навешен водяной руль.
Ниже плоскости днища поплавков расположены четыре деревянных четырехлопастных несущих винта (по два на борт) диаметром 2450 мм. Угол атаки лопастей 8е. Установлены несущие винты под углом 30° к поверхности воды.
Вращение коленчатого вала двигателя передается на первую ступень понижающего редуктора-тройника с цилиндрической зубчатой передачей, распределяющего мощность на правый и левый борт. В свою очередь на каждом борту имеются по два понижающих редуктора-тройника с конической передачей, которые осуществляют раздачу мощности через конечные ступени редуктора уже на носовой и кормовой винты. На промежуточном валу правого борта установлена пружинная муфта для измерения крутящего момента.
Выходные обороты на винтах, замеренные тахометром при форсированном режиме работы двигателя (2700 об/мин) в зависимости от примененного варианта передачи составляли: 170, 215, 261 и 295 об/мин. Такое испытание с четырьмя вариантами передачи должно было помочь нащупать тот барьер, после преодоления которого гидролет начинает движение в новом режиме.
Как же двигался гидролет на испытаниях?
Информация об изображении
Гидролет перед очередным испытанием. Хорошо видна конструкция несущих винтов
На малых оборотах двигателя включалась муфта сцепления и при 1000 об/мин на винтах начинала возникать подъемная сила — аппарат чуть привсплывал. Вперед он еще не двигался. Ведь пока вращающийся винт погружен полностью, движущая вперед сила, образующаяся на одной лопасти, гасится равной, но противоположной по направлению силой, образующейся на симметричной лопасти. Другими словами, пока гидролет не будет вытолкнут из воды так, чтобы винты стали лишь частично погруженными и превратились в движители, движения вперед быть не может. А вытолкнуть аппарат из воды оказалось нелегко.
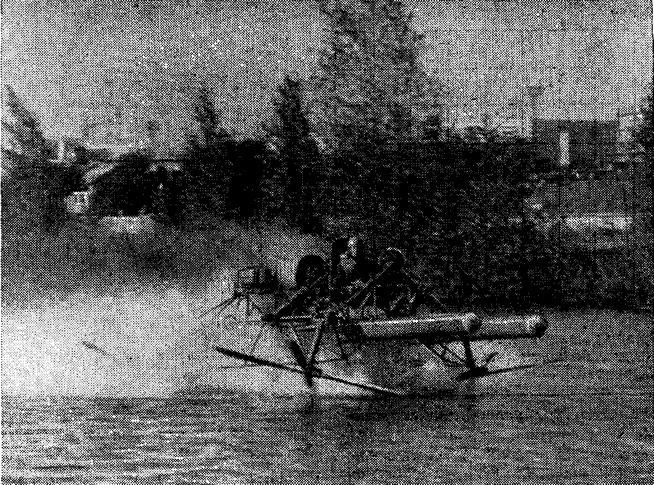
Гидролет перед очередным испытанием. Хорошо видна конструкция несущих винтов
При увеличении числа оборотов до 1500 об/мин поплавки приподнимались над поверхностью примерно на 0,5—0,6 м, но ступицы винтов еще оставались под водой; гидролет начинал движение вперед, однако разогнать двигатель до номинального числа оборотов и вывести аппарат на расчетный режим движения не удавалось.
Чтобы преодолеть ярко выраженный горб на кривой гидродинамического сопротивления, пришлось двигателю помогать — устанавливать маховик весом 60 кг и диаметром 600 мм. Теперь, когда двигатель на холостых оборотах разгонялся до 2000—2500 об/мин, маховик аккумулировал механическую энергию. Затем плавко включалась установленная за маховиком фрикционная муфта сцепления, аппарат поднимался и, как только ступицы винтов оказывались на поверхности, гидролет буквально выпрыгивал из воды и очень быстро набирал максимальную скорость. Винты на режиме полета становились «легкими», подводимая к ним мощность оказывалась чрезмерной, частота вращения коленчатого вала быстро достигала 3500 об/мин, двигатель шел вразнос. Приходилось убавлять «газ», скорость падала...
Такая история повторялась фактически на всех передачах, причем при движении на последнем варианте передачи муфта сгорела.
Итак, выход на режим полета сопровождался резким падением потребляемой мощности. Замеры крутящего момента на гребном валу показали, что резкое возрастание скорости движения сопровождается снижением момента с 70—75 до 20—25 кгс·м. Это дает основание считать, что на скорости около 70 км/ч фактически потребляемая мощность двигателя не превышает 60 л.с.
Все испытания проходили в хорошую погоду, когда волны практически не было, поэтому сделать вывод о мореходности аппарата трудно. Были случаи, когда на полной скорости приходилось преодолевать одиночную волну высотой 0,5—0,6 м от проходящих катеров; на характере движения гидролета это практически не сказывалось.
Насколько устойчиво движение гидролета? Однажды на полном ходу под кормовой винт попал какой-то плавающий предмет. Деревянную лопасть мгновенно срезало, но аппарат продолжал идти по прямой (правда, движение стало сопровождаться вибрацией), Кстати сказать, вибрация иногда появлялась из-за плохой балансировки винта при движении в штиль, а при появлении мелкой волны исчезала. Был случай, когда правый кормовой винт вообще отлетел в сторону — гидролет шел на трех винтах опять-таки по прямой, но с небольшим креном на правый борт.
Тормозной путь гидролета при посадке небольшой — на воду он садится практически мгновенно и без поступательного движения.
Какие недостатки гидролета были отмечены при испытаниях? Прежде всего, конечно, это большой «моментный барьер» при выходе на режим полета. Вероятно, нужны какие-то специальные стартовые устройства, помогающие преодолевать крутой «горб» на кривой гидродинамического сопротивления.
К минусам можно отнести и значительную неравномерность и асимметричность нагрузок на несущих винтах. Сила реакции воды, действующая на погруженную часть лопасти, всегда оказывается приложенной на каком-то довольно значительном расстоянии от оси винта. Нагрузки на лопасть, совершающую рабочий ход, несоизмеримо больше, чем на симметричную ей лопасть, находящуюся в воздухе во время холостого хода. В этом существенное отличие характера работы винта гидролета от работы всегда уравновешенного воздушного винта самолета или гребного винта судна. В течение каждого оборота четырехлопастной винт гидролета по существу воспринимает четыре сильных удара: ведь нагрузка на лопасть в момент вхождения ее конца в соду возрастает от минимума до максимума мгновенно. Если бы можно было изменять углы атаки лопастей в течение каждого оборота, увеличивая их в воздухе и уменьшая в воде, удалось бы не только несколько сгладить эти пики нагрузки, но и удерживать часть веса судна благодаря реакции лопастей при движении в воздухе. При таком режиме должны улучшиться и мореходные качества аппарата.
Если бы придать корпусу аэродинамическую обтекаемую форму, применить более простую и надежную трансмиссию, использовать прочные титановые винты с изменяющимся шагом (изменяя углы атаки лопастей и число оборотов винтов раздельно для правого и левого борта, можно будет совершать крутые повороты без гидроруля), — уверен, что удалось бы сделать аппарат гораздо более эффективным, удобным и быстроходным.
Конкретная далеко не совершенная конструкция не дает оснований для количественной и сравнительной оценки гидролета в принципе. Тем более, что нам еще не удалось достичь оптимальных величин при испытаниях. Однако полученные результаты можно оценить как обнадеживающие. Если в момент начала движения эффективность гидролета (произведение веса аппарата — около 1000 кг — на скорость, деленное на расходуемую мощность). очень низка, то с ростом скорости она резко возрастает и где-то около 65 км/ч достигает уровня эффективности обычных СПК. Расчеты показывают, что при скоростях, превышающих кавитационный барьер, ограничивающий скорости СПК, гидролет окажется значительно эффективнее их. Теоретически для аппаратов, использующих принцип гидролета, нет каких-либо видимых барьеров, препятствующих достижению все более высоких скоростей. Ученые Института механики при МГУ имени М. В. Ломоносова считают этот принцип перспективным. Доктор физ.-мат. наук Ю. Л. Якимов, например, теоретически обоснован его высокую эффективность.
«Принцип движения у поверхности воды, предложенный автором, заслуживает внимания. После тщательной разработки конструкции гидролета и оптимизации его технико-экономических показателей он, по-видимому, сможет занять свое место среди таких аппаратов, как СПК, СВП, экранопланы и т. д.», — такое заключение дал Институт механики. Был составлен договор о творческом содружестве между коллективами трех институтов и обкомом ДОСААФ г. Челябинска по доводке испытанного образца.
По профессии я далек от судостроения, поэтому мне было очень важно услышать мнение профессиональных корабелов. Сначала они категорически отрицали самую возможность применения такого необычного принципа движения. Затем, когда гидролет все-таки полетел, их оценки стали более осторожными.
В своем заключении они дают сравнительную оценку гидролета с судами, которые не могут в принципе получить даже близких результатов по скорости. Ведь у гидролета, как упоминалось выше, применяются крылья аэродинамического профиля в докавитационном режиме движения; не сказывается зависимость роста сопротивления (в квадрате) на несущих элементах, работающих в воде, от роста скорости судна; сопротивление движению несущего элемента (крыла) в воде является силой, используемой для передвижения судна; кроме того гидролет при различных скоростях как бы следует за профилем водной поверхности — это обеспечивает ему устойчивость движения и маневренность.
Таким образом, если удастся создать рациональную конструкцию гидролета, то в ближайшем будущем станет возможным достижение таких скоростей, которых другими известными способами получить нельзя.
Окончательный ответ могут дать только дальнейшие испытания. А для этого надо построить новую, совершенную модель экспериментального гидролета.
Примечания
1. О гидролете А. С. Бакшинова были публикации в журналах «Рационализатор и изобретатель» № 2 и «Техника — молодежи» № 6 за 1982 г.
2. Автор — инженер Магнитогорского горно-металлургического института имеет 35 авторских свидетельств (в том числе патенты Франции, Англии, США, Японии и др.).