
Важную роль играет н расположение гребного винта относительно корпуса судна, — оптимальные заглубление оси винта и ее наклон к горизонту, расположение и форма кронштейнов гребного вала (подводной части колонки, подвесного мотора), расположение и форма ближайших частей корпуса судна и т. д. Немаловажно и состояние поверхностей погруженной части корпуса: опытные судоводители-любители, не говоря уже о гонщиках, уделяют большое внимание всем доступным мерам уменьшения сопротивления трения обшивки и сопротивления выступающих частей. Обо всем этом также говорилось не раз (см. например, №71).
Цель этой статьи — обратить внимание начинающих капитанов на то, что в большинстве случаев практически не используется еще один и довольно существенный резерв повышения скорости и соответствующей экономии горючего. Речь идет о снижении сопротивления воды движению глиссирующего судна только за счет того, что на всех этапах плавания поддерживается оптимальным ходовой дифферент — угол атаки днища к горизонту воды. Опыт показывает, что нередко благодаря изменению ходового дифферента удается повысить скорость на 15, а то и 20%!
Разумеется, и по данному вопросу можно напомнить целый ряд полезных публикаций. Так, еще в 6 выпуске сборника (1966 г.) была напечатана краткая, но содержательная статья Л. М. Кривоносова «О ходовом дифференте катера». Однако в сегодняшних условиях, когда вопросам экономичности придается особое значение, стоит вернуться к этой важной теме.
В принципе для каждого катера (для краткости будем называть так любое моторное глиссирующее судно) существует оптимальный для каждой определенной скорости угол атаки, при котором сопротивление воды движению имеет минимальное значение. В зависимости от соотношения смоченной длины и ширины рабочего — глиссирующего — участка днища этот угол колеблется в пределах от 2° до 7°. Чем шире и короче этот рабочий участок днища, тем меньше оптимальный угол атаки, и наоборот. Это обусловлено тем, что на широкой и короткой, похожей на крыло самолета, глиссирующей пластине образуется значительно большая подъемная сила, чем на движущейся с той же скоростью узкой и длинной пластине.
В среднем величина угла атаки составляет:
- для реданных и трехточечных высокоскоростных глиссеров и катамаранов 2,5—3°;
- для катеров с обычным соотношением размерений 3—4°;
- для катамаранов без поперечных реданов и катеров с обводами глубокое V 5—7°.
Почему же в определенных условиях оптимальный угол атаки оказывается лежащим в столь ограниченных, узких пределах?
Информация об изображении
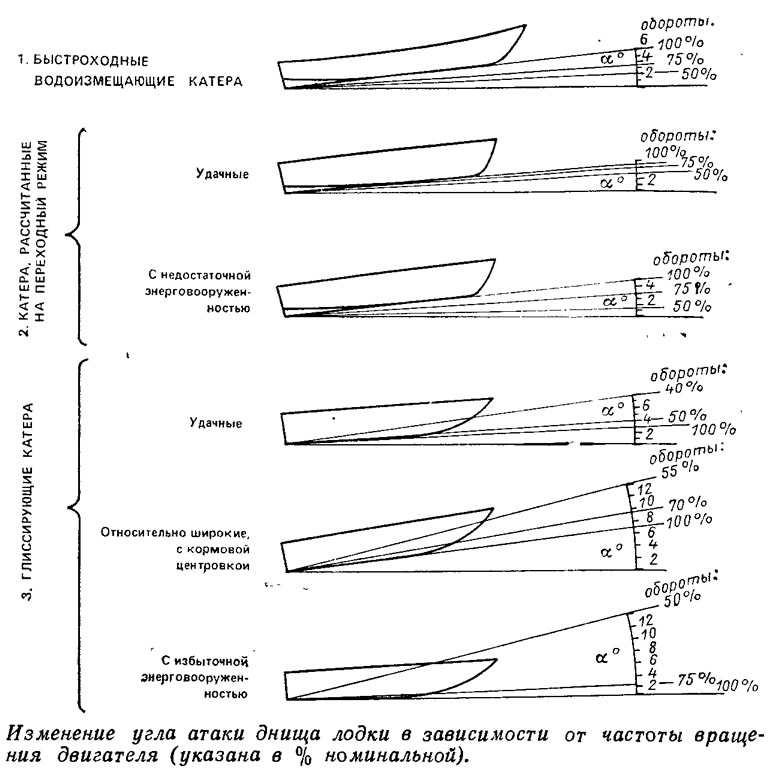
Изменение угла атаки днища лодки в зависимости от частоты вращения двигателя
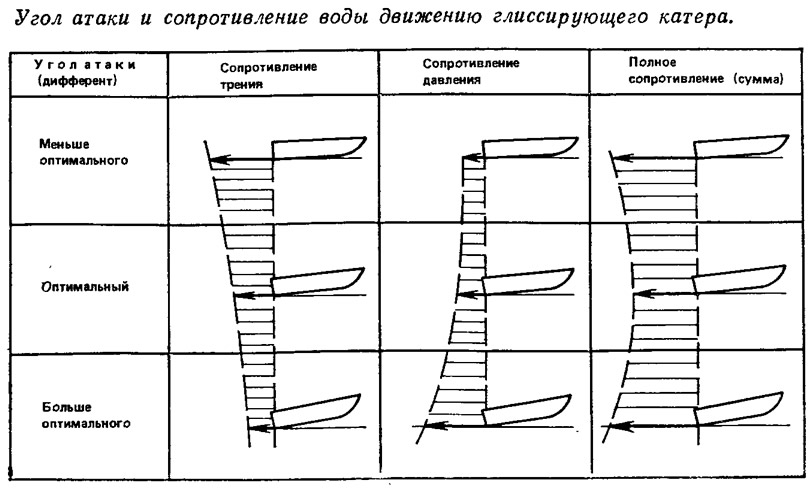
Сопротивление воды установившемуся движению глиссирующего катера состоит из двух слагаемых: сопротивления трения и сопротивления давления встречного потока воды. Сопротивление трения с увеличением угла атаки уменьшается, так как при постоянной (от скулы до скулы) ширине днища его смоченная длина — длина глиссирующего участка днища — уменьшается, а значит, меньше становится и смоченная поверхность. Сопротивление же давления, наоборот, с увеличением угла атаки возрастает. То значение угла атаки, при котором сумма обеих этих составляющих минимальна, и будет оптимальным.
Изменение угла атаки днища лодки в зависимости от частоты вращения двигателя
Ходовой дифферент (условно будем считать, что это — то же самое, что и угол атаки) изменяется в довольно широких пределах в зависимости от скорости катера, т. е. с повышением частоты вращения коленчатого вала двигателя от минимально устойчивой до номинальной.
Дифферент быстроходных водоизмещающих катеров при этом плавно возрастает до 5—6°.
Удачно спроектированные и отцентрованные катера для переходного режима при частоте вращения 50% номинальной идут с дифферентом около 3°, затем, с дальнейшим увеличением числа оборотов, дифферент увеличивается, но уже менее заметно. Если же энерговооруженность катера для переходного режима недостаточна (менее 15 кВт/т или 21 л. с./т), то увеличение дифферента будет особенно интенсивно происходить как раз на частоте вращения, приближающейся к номинальной.
Удачные глиссирующие катера получают максимальный ходовой дифферент (однако не более 8°) при частоте вращения около 40% номинальной; затем дифферент уменьшается до оптимального значения, соответствующего номинальным оборотам и максимальной скорости; как отмечалось выше, это 3—4°.
Относительно широкие глиссирующие катера на всем диапазоне изменения частоты вращения двигателя обычно имеют чрезмерный дифферент, максимум которого (до 14°) достигается при сравнительно большей частоте вращения, чем у более удачных катеров.
Глиссирующие катера, имеющие избыточную мощность двигателя, при частотах вращения двигателя от 80% номинальной и выше идут с малым ходовым дифферентом (2° и менее). Для таких катеров характерно некоторое снижение скорости при повышении частоты вращения двигателя.
На практике даже удачно спроектированные серийные катера идут с оптимальным дифферентом далеко не во всем диапазоне скоростей. Обычно наблюдается излишний дифферент в районе так называемого «горба» на кривой сопротивления, что соответствует выходу катера на глиссирование. На полном же ходу глиссирующие катера, наоборот, довольно часто идут с дифферентом, который меньше оптимального.
От чего зависит величина ходового дифферента?
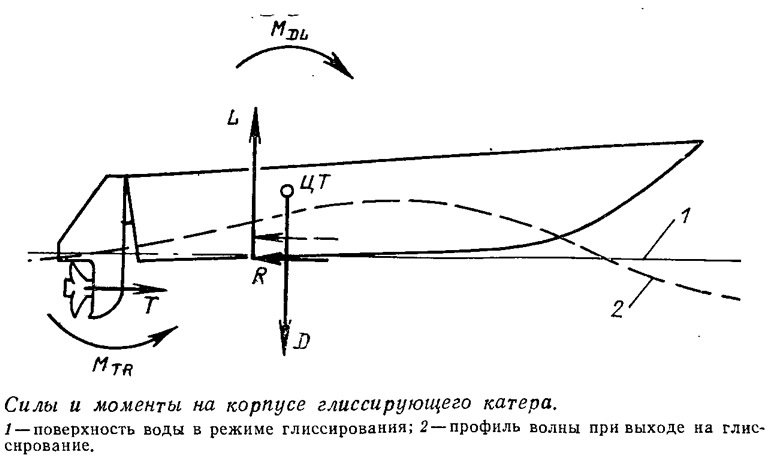
Рассмотрим упрощенную схему сил и моментов, действующих на глиссирующий катер на ходу. Равновесие определяется величиной и взаимным расположением четырех основных сил: массы катера D; силы поддержания L; тяги гребного винта Т; сопротивления воды движению катера R.
Массу катера будем считать в данных условиях постоянной. Сила поддержания равна массе катера по величине и противоположна по направлению. Силы тяги и сопротивления возрастают по мере повышения частоты вращения коленвала двигателя, т. е. пока катер разгоняется до максимальной скорости полного хода.
Силы D и L создают момент, дифферентующий катер на нос. Этот момент при установившемся движении уравновешивается равным по величине и противоположным по направлению моментом сил Т и R.
До выхода на глиссирование — в режиме водоизмещающего движения малым ходом сила поддержания L состоит в основном из архимедовой силы, величина которой определяется объемом погруженной части корпуса судна — массой вытесненной корпусом воды, т. е. водоизмещением (массой) судна. Распределение погруженного объема по длине катера существенно изменяется в зависимости от скорости, чем и обусловлено изменение ходового дифферента. С увеличением скорости растет носовая поперечная волна, нос катера всплывает, а корма погружается в воду до тех пор, пока снова не будет достигнуто равновесие, т. е. равенство действующих на судно противоположных по направлению моментов.
С дальнейшим повышением скорости начинает заметно возрастать образующаяся на плоской пластине днища гидродинамическая подъемная сила и уменьшаться — архимедова сила (общая же их сумма, т. е. сила поддержания, подчеркнем, остается неизменной). Катер всплывает всем корпусом и начинает глиссировать.
При установившемся глиссировании силу поддержания L уже почти целиком составляет гидродинамическая подъемная сила. Эта сила зависит от площади глиссирующей поверхности днища, ее формы, угла атаки (дифферента) и скоростного напора воды. В то же время по величине она (по условию равновесия) по-прежнему должна быть равна массе судна D, т. е. должна оставаться постоянной. Именно поэтому с повышением скорости, т. е. с увеличением скоростного напора воды, должны соответственно уменьшиться площадь глиссирующего участка или угол атаки, либо то и другое одновременно.
Разумеется, для достижения наибольших скоростей было бы выгодно уменьшение смоченной поверхности, дающее заметное снижение сопротивления трения. Однако в этом случае вследствие укорочения глиссирующего участка (ширина ее от скулы до скулы в общем случае постоянна) точка приложения силы L существенно смещается в корму и тем самым нарушается равенство моментов сил. Нос глиссера начинает опускаться, значительно уменьшается угол атаки, а смоченная поверхность днища вновь увеличивается. В результате значительно повышается сопротивление трения, а следовательно, и полное сопротивление воды движению катера. Судно не добирает скорость, имеет жесткий ход при волнении.
Такова общая картина изменения дифферента в зависимости от скорости. Рассмотрение ее дает основание для практически очень важного вывода. Поскольку при проектировании катера его рассчитывают на какую-то одну определенную скорость, а при эксплуатации на всех других скоростях его дифферент оказывается не оптимальным, целесообразно оборудовать глиссирующий катер какими-либо средствами управления ходовым дифферентом. К числу таких средств относятся диф-ферентовочные цистерны, управляемые транцевые плиты и управление углом наклона оси гребного винта.
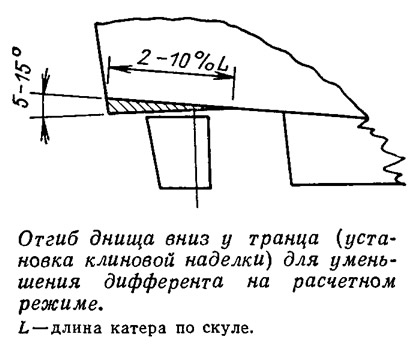
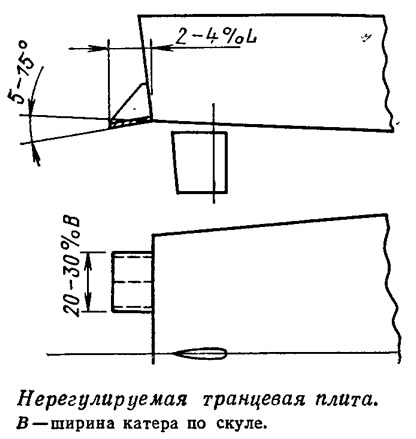
Первоначально указанные средства появились и использовались лишь для исправления явных ошибок, допущенных при проектировании катера. Если, например, катер в переходном режиме идет с высоко задранным носом при мощном волнообразовании, то всплыть корме (уменьшить дифферент) и выйти на режим глиссирования помогают отгиб днища в корме вниз и фиксированные (неуправляемые) транцевые плиты. Эти меры дают двойной эффект: благодаря изменению продольного профиля днища повышается подъемная сила, а точка приложения силы поддержания L смещается в корму, что способствует уменьшению дифферента.
Следующий шаг вперед — регулируемые транцевые плиты. Регулировка их положения на стоянке позволяет подобрать оптимальный для предстоящих условий конкретного плавания угол отклонения плит от плоскости днища и, следовательно, обеспечить движение с оптимальным дифферентом во всем диапазоне скоростей.
Отсюда недалеко и до управляемых транцевых плит, угол отклонения которых может быть изменен на ходу. Две такие плиты по бортам с раздельным управлением дают, кроме того, и возможность при помощи изменения гидродинамических сил выравнивать крен катера на повороте, от несимметричной нагрузки, вращающего момента винта и т. п. Привод управляемых транцевых плит может быть механическим с ручным управлением, электромеханическим и электрогидравлическим.
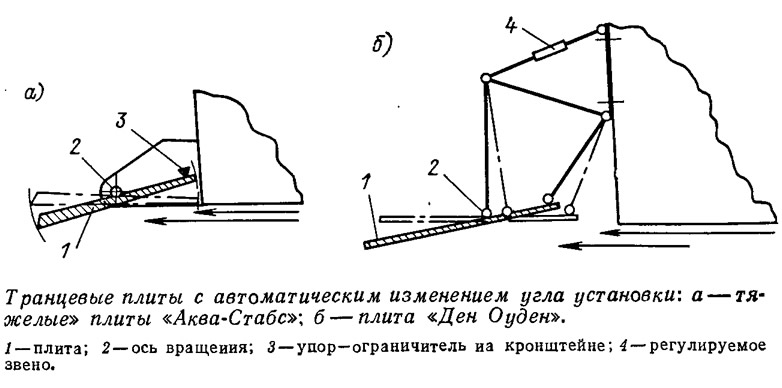
Существуют и конструкции не просто управляемых, а автоматических транцевых плит, угол отклонения которых изменяется автоматически в зависимости от дифферента катера и скоростного напора. Эта обратная связь обеспечивает оптимальное управление дифферентом в расчетном диапазоне скоростей. Приводим схемы стартового устройства «Аква-Стабс» (США), а также параллелограммного механизма фирмы «Ден Оуден» (Голландия).
Разновидность управляемых транцевых плит — встроенные триммеры обеспечивают повышенную живучесть узла и минимум помех при маневрировании: в нерабочем положении плиты вписываются в поверхность кормовой части днища и лишь при отклонении выходят вниз. Аналогичное устройство имеет кормовой стабилизатор на известном реданном катере «Дайнаплейн» (см. сборник №14). Плита, утопленная в днище, при помощи гидравлического привода выдвигается с заданным углом атаки. Катер этот показал исключительно высокие ходовые качества при удовлетворительной мореходности.
Известный катеростроитель Хуан Баадер очень точно сказал: «Транцевые плиты — отличный пример того, как благодаря несложным мероприятиям достигаются большие успехи».
Практическим руководством для полного расчета управляемых транцевых плит могут служить статья А. С. Павленко и С. Б. Соловья в сборнике №40 и книга Н. Т. Егорова, М. М. Бунькова и Н. Н. Садовникова «Ходкость и мореходность глиссирующих катеров» (Л., «Судостроение», 1978). Интересен опыт В. С. и А. И. Кулешевых, применивших и серьезно испытавших транцевые плиты с электроприводом на 7-метровом катере «Баргузин» (см. №82). По их расчетам применение транцевых плит на мотолодке «Прогресс» при эксплуатации ее с одним мотором «Вихрь» при водоизмещении D=700 кг дает выигрыш в скорости до 27—38% (в зависимости от центровки), а с мотором «Вихрь-М» 13—31%. Думается, стоит напомнить в этой связи вывод, сделанный в статье «Союз винта и корпуса» в том же номере сборника: «Установка подобных плит экономически целесообразна на многих моторных лодках, особенно на тех из них, которые эксплуатируются при значительной нагрузке и недостаточной мощности мотора».
Движение катеров с углами атаки меньше оптимального не так бросается в глаза, как излишний дифферент в переходном режиме. Повышенное сопротивление воды и связанная с ним потеря скорости при чрезмерно малом дифференте не так очевидны и присущи только действительно быстроходным катерам. Если глиссирующий катер идет с дифферентом менее 2°, почти наверняка можно сказать, что он не добирает добрых 5 км/ч за счет повышенного сопротивления трения. Если заставить этот катер идти с большим дифферентом, можно получить явную прибавку скорости.
Однако транцевые плиты в данном случае окажутся бессильны. Благодаря плитам можно создать момент, прижимающий нос к поверхности воды, но невозможно увеличить действительный угол атаки. Здесь может помочь смещение центра тяжести в корму. На легкой гоночной лодке для этого достаточно водителю переместиться ближе к транцу. На крупных гоночных катерах приходится применять цистерны водяного балласта, при помощи которых можно изменять центровку в зависимости от условий движения. Однако устройство цистерн сравнительно сложно и не позволяет быстро осуществлять тонкую регулировку дифферента.
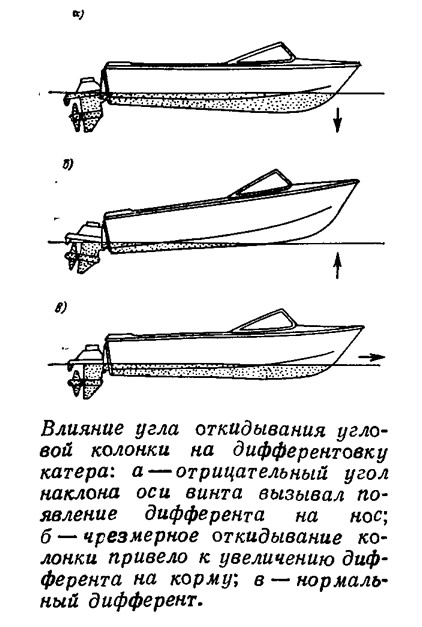
Определенное влияние на момент сил Т и R оказывает наклон оси гребного винта к горизонту. В последние годы развиваются и успешно применяются конструкции, позволяющие на ходу откидывать подвесной мотор или угловую колонку на величину до 60—75° от вертикали — вплоть до выхода гребного винта из воды. Появившись первоначально как устройство, облегчающее очистку гребного винта, осмотр и замену его на плаву, а также предохраняющее винт при подходе к необорудованному берегу, устройство для дистанционного откидывания колонки стало все чаще использоваться для активного управления ходовым дифферентом. Изменение наклона оси гребного винта производится при помощи механического, электромеханического или гидравлического привода.
Оригинальное устройство применила фирма «ОМС» на 6-метровом разъездном катере «Сан Хатч». Вся его силовая установка — 200-сильный двигатель с поворотно-откидной колонкой — выполнена качающейся вокруг горизонтальной оси, проходящей через кормовые опоры. Регулирование угла наклона осуществляется винтовым электромеханическим приводом, который поднимает или опускает носовой конец двигателя. Пределы изменения угла наклона установки — от +4°10' до —3°40'. Кнопка управления приводом вынесена на рычаг газа.
Серия испытаний убедительно продемонстрировала эффективность этого способа изменения дифферентовки катера на ходу. Отрицательный наклон оси винта позволил на режиме плавания при полной нагрузке (6 чел.) вдвое увеличить скорость при одновременном снижении расхода топлива в 1,3 раза.
Положительный наклон оси гребного винта дал возможность получить наивысшую скорость 74,3 км/ч, что на 3,5 км/ч больше скорости полного хода при нейтральном положении линии тяги. При этом катер имел дифферент около 1°, т. е. был явно меньше оптимального. Несомненно, если бы можно было откинуть колонку от транца еще больше, скорость катера могла быть увеличена!
Разумеется, этот способ управления дифферентом катера эффективен только на небольших судах с высокой энерговооруженностью (50 кВт/т или 68 л. с./т и более). С увеличением размерений судна влияние момента тяги на дифферент заметно уменьшается.
Определенные перспективы обещает предложенная за рубежом конструкция управляемого триммера в виде одного или двух подводных крыльев, размещаемых под транцем в районе двигателя. Подобное устройство, напоминающее горизонтальные рули подводной лодки, дает возможность на катерах любых размерений создавать как положительный, так и отрицательный дифферентующий момент. Зарубежные специалисты считают, что особенно эффективно сочетание различных средств управления ходовым дифферентом — например транцевых плит и наклона оси гребного винта. Такое сочетание должно обеспечить возможность при изменениях погоды и нагрузки судна, при использовании как полной мощности силовой установки, так и части ее, — всегда идти с оптимальным дифферентом, а значит — с наибольшей возможной в данных условиях скоростью при наименьших затратах топлива.
В заключение остается пожелать любителям-судоводителям, заинтересовавшимся данным вопросом, поэкспериментировать, изменяя угол откидывания своего подвесного мотора. Естественно, непременным условием подобных опытов должна быть определенная точность замера скорости. Как показывает опыт, даже столь простое средство Дает практически ощутимый результат.