
Глиссирующие суда наиболее «старые» из этого семейства (первый глиссер был построен более ста лет назад) и потому получили наибольшее распространение в современном судостроении. Океанские гоночные катера развивают сейчас скорости до 140 км/час, есть немало пассажирских и транспортных катеров, достигающих скорости 80—100 км/час. Но ни корпус «глубокое V», ни чрезмерные мощности двигателей не спасают глиссирующие суда от их основного недостатка — огромных динамических перегрузок, возникающих при движении на волнении.
Принцип воздушной подушки судостроители впервые применили около 60 лет назад. Сначала корпус катера удалось лишь частично оторвать от поверхности воды, и даже небольшая волна становилась причиной перехода судна обратно в режим глиссирования. На современных аэроходах (как иногда называют СВП — суда на воздушной подушке) благодаря гибкому ограждению-— «юбке», ограничивающему воздушную подушку под корпусом по всему периметру, удалось обеспечить подъем катера на большую высоту над поверхностью воды, а следовательно, повысить мореходность этого типа судов. Но, тем не менее, достижение мореходных качеств, сравнимых с обычными водоизмещающими судами, остается основной проблемой для конструкторов СВП.
Экраноплан по своему принципу действия близок к самолету: его удерживает в воздухе подъемная сила крыльев, а двигатели обеспечивают лишь поступательное движение. Но по сравнению с самолетом этот аппарат имеет менее мощную и тяжелую двигательную установку, меньший расход топлива, более высокую полезную нагрузку. Проектируемые уже сегодня экранопланы будут способны принять на борт несколько сотен пассажиров или десятки тонн груза и доставить их через океан со скоростями 180—220 км/час. А в будущем скорости подобных машин могут вырасти до 300 и даже 450 км/час.
Информация об изображении
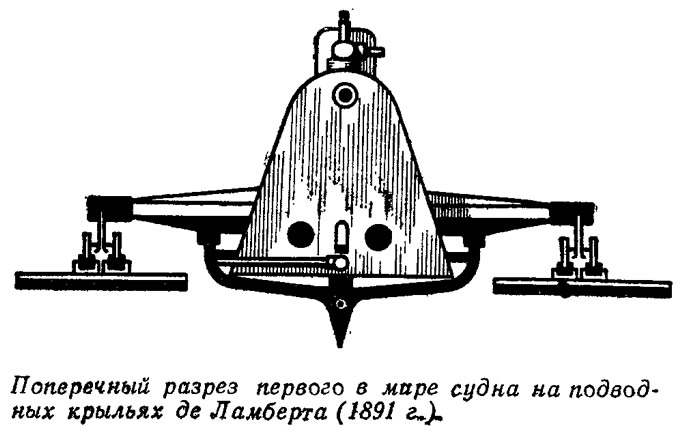
Поперечный разрез первого в маре судна на подводных крыльях де Ламберта (1891 г.)
Однако экономические преимущества экраноплана целиком базируются на так называемом экранном эффекте, который проявляется лишь при относительно небольшой высоте парения аппарата над поверхностью моря — обычно расстояние от нижней плоскости крыла до воды не превышает хорды крыла, а это для небольшого экраноплана измеряется величиной от нескольких десятков сантиметров до 1—1,5 м. Поэтому, ; как и для СВП, главной проблемой создателей экранопланов остается задача — обеспечить устойчивое движение в условиях взволнованного моря.
Поперечный разрез первого в маре судна на подводных крыльях де Ламберта (1891 г.)
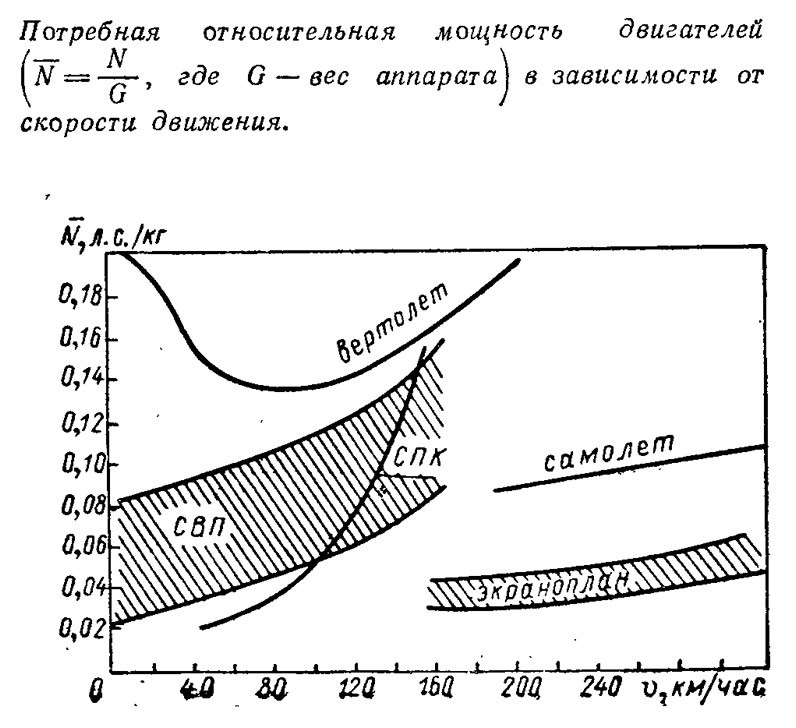
Пожалуй, среди перечисленных типов быстроходных катеров наиболее близки к достижению необходимых Переходных качеств суда на подводных крыльях (в дальнейшем будем их называть для краткости СПК)-Кроме того, СПК в определенном диапазоне скоростей и водоизмещений оказываются и экономически выгоднее других типов. Это иллюстрирует, например, рисунок, где показана зависимость удельной мощности двигателя (мощности, отнесенной к весу судна) от его скорости. Выгодным диапазоном для СПК являются скорости 60—160 км/час. Но подробнее о возможностях малых судов на подводных крыльях уместно судить после знакомства с особенностями их конструкции, принципом действия подводного крыла и основными направлениями развития СПК.
Проект первого судна на подводных крыльях был запатентован в 1891 г. во Франции Ш. А. де Ламбертом. Позднее, в 1897 г. он построил небольшой катер, на котором установил 8 несущих плоскостей — по четыре с каждого борта. Катер приводился в движение легким паровым двигателем. При испытаниях корпус судна не отрывался полностью от воды, движение было неустойчивым, и тем не менее катер де Ламберта можно считать прообразом современных речных судов на плоских малопогруженных подводных крыльях.

Более удачными были эксперименты с подводными крыльями, проведенные в 1905 г. итальянцем Э. Форланини. Он построил судно, снабженное несколькими крыльями, расположенными друг над другом. В начальный момент движения «работали» все крылья, но по мере разгона судно поднималось над поверхностью воды и шло только на самых нижних плоскостях. Скорость этого катера достигала 72 км/час.
В 1907 г. патент Форланини был куплен известным американским конструктором, одним из изобретателей телефона А. Г. Беллом, который совместно с К. Болдуином построил и испытал серию судов на подводных крыльях. Наиболее удачное из них — «HD-4», имевшее водоизмещение 5 т, во время испытаний в 1919 г. развило скорость 114 км/час. Этот результат долгое время являлся рекордом скорости на воде.
Во время второй мировой войны обширные исследовательские работы по созданию катеров на подводных крыльях проводились в Германии под руководством Г. Шертеля. Было построено и испытано более десяти судов различного назначения: спортивных, патрульных, военных. Наиболее крупный из них — катер «Г5-8» — имел водоизмещение 80 т и развивал скорость до 76 км/час с двигателем мощностью 4000 л. с. Характерной особенностью катера были Г-образные подводные крылья, пересекающие поверхность воды. По сравнению с плоскими, они обеспечивали более устойчивый ход судна на волнении.
По-настоящему же широкое распространение суда на подводных крыльях получили в послевоенные годы. Теперь от них требовались не только высокая скорость и хорошие мореходные качества, но и экономичность. В ряде стран, и прежде всего в СССР, были созданы рентабельные пассажирские суда на подводных крыльях, которые успешно используются не только в условиях рек и озер, но и на морских пассажирских линиях. Крылатые катера «Ракета», «Метеор», «Комета», «Волга» широко распространены не только в нашей стране, но и за рубежом.
За границей крупнейшей фирмой, занимающейся проектированием СПК, является швейцарская «Супрамар», созданная на базе группы Шертеля. Наиболее известные СПК этой фирмы,такие как «РТ-20», «РТ-50», «РТ-150» (водоизмещение последнего судна — 165 т, число пассажиров — 250 человек), предназначены для прибрежных морских линий. К настоящему времени построено несколько десятков СПК этих проектов; суда используются в Западной Европе, Южной Америке, Японии.
Начиная с 50-х годов значительное распространение СПК получили в США, где развитие судов этого типа связывалось в первую очередь с их военным применением. Были проведены обширные исследования, построено несколько опытных судов водоизмещением от 5 до 320 т. Основной задачей являлось создание быстроходных кораблей на подводных крыльях, которые могли бы действовать в условиях открытого моря.
Во второй половине 60-х годов исследователи и конструкторы вплотную столкнулись с целым рядом проблем, связанных с увеличением размеров СПК, повышением скоростей хода и мощности устанавливаемых на судах двигателей. Это проблемы обеспечения прочности крыльевых устройств, предотвращения отрицательных последствий кавитации подводных крыльев, создания высокоэффективных движителей и т. п.
Принцип действия подводного крыла сейчас хорошо известен самым широким кругам читателей — при движении судна на крыле создается подъемная сила, поддерживающая катер над водой. Поток воды, набегающий на крыло под некоторым положительным углом атаки, на нижней поверхности крыла (плоской или слегка вогнутой) замедляется, а на верхней (выпуклой) — ускоряется. При этом на верхней стороне крыла давление уменьшается, а на нижней его стороне — увеличивается по сравнению с давлением в невозмущенной жидкости. В результате и возникает подъемная сила крыла. Исследования показывают, что примерно 2/3 этой подъемной силы создается за счет разрежения (понижения давления) на верхней и около 1/3 — на нижней стороне крыла (из-за повышенного давлений). Обе составляющие подъемной силы направлены в одну сторону — вверх.
При движении крыла (как и любого твердого тела в жидкости) с большой скоростью возможно возникновение на его верхней поверхности полостей, заполненных газом или паром. Это явление называется кавитацией. Как это происходит? В тех случаях, когда степень разрежения достигает значения давления насыщенных паров воды при данной температуре, жидкость вскипает. Образующиеся при этом полости заполняются паром и выделившимися из жидкости газами, и постепенно, по мере увеличения скорости, образуется большая газовая полость — каверна.
Кавитация, а также прорыв воздуха с поверхности воды в область пониженного давления (на стойки и крыло) резко ухудшают характеристики несущих поверхностей: начальные стадии кавитации вызывают эрозию металла крыла и вибрацию, а при развитой кавитации резко падает подъемная сила и увеличивается сопротивление воды.
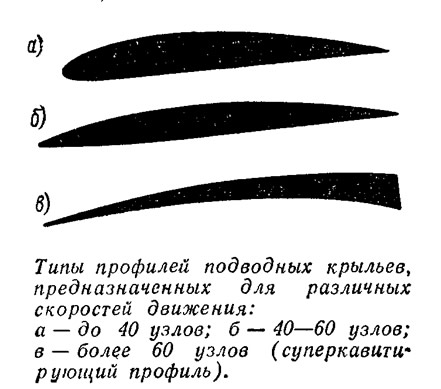
При больших скоростях движения (свыше 100 км/час) избежать кавитации подводного крыла невозможно. Поэтому актуальной становится задача проектирования крыльев, которые были бы устойчивы против начальных стадий кавитации, а при ее развитии давали бы наибольшую при данных условиях подъемную силу. Такими свойствами обладает крыло с суперкавитирующим профилем, у которого подъемная сила создается за счет нагнетающей стороны, а засасывающая покрыта паровой или воздушной каверной.
На ходу судно на подводных крыльях должно сохранять заданное при проектировании положение над водой по высоте и углу дифферента и идти без крена, независимо от состояния водной поверхности. Для этого крыльевая система должна обладать способностью регулировать величину подъемной силы в зависимости от глубины погружения крыльев. Простейшим способом такого регулирования является конструкция частично погруженных подводных крыльев, несущая площадь которых меняется при изменении осадки. При увеличении осадки площадь крыла увеличивается, соответственно возрастает и подъемная сила.
У полностью погруженного крыла действует эффект увеличения коэффициента подъемной силы при удалении его от свободной поверхности. Коэффициент подъемной силы крыла можно также изменять за счет принудительного регулирования угла атаки.
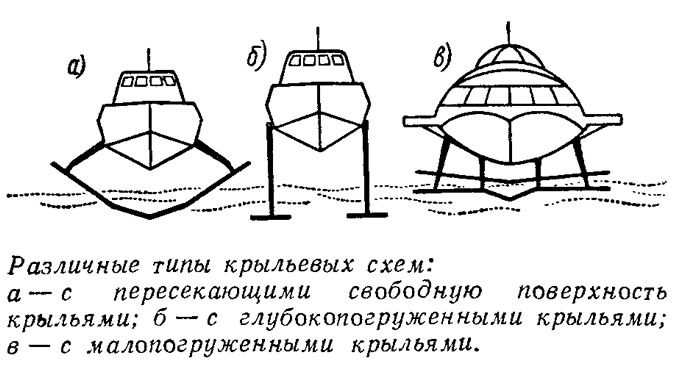
В соответствии с указанными принципами различают следующие характерные виды крыльев:
1) пересекающие свободную поверхность воды У-об-разные или дуговые крылья (катера Шертеля), а также лестничные крылья со ступенчатым изменением площади (как на катерах Форланини);
2) плоские малопогруженные крылья (большинство отечественных речных СПК);
3) автоматически управляемые глубокопогруженные крылья, где угол атаки или угол отклонения закрылка регулируется автоматической системой управления.
На практике обычно применяются более сложные конструкции, сочетающие различные комбинации элементов основных простейших типов крыльев.
У судов с глубокопогруженными крыльями отсутствует эффект изменения подъемной силы в зависимости от осадки; нет также возможности изменять площадь. Поэтому даже при незначительных возмущениях водной поверхности такие СПК теряют устойчивость движения на крыльях и требуется вмешательство автоматики. Система автоматического управления подводными крыльями довольно сложна; она включает в себя датчики, которые измеряют мгновенные значения углов дифферента, крена, курса, положения центра тяжести судна по высоте. Эти величины автоматически сравниваются электронной системой с заданными значениями. Сигналы рассогласования усиливаются и поступают на электрогидравлические приводы, которые отклоняют закрылки или поворотные крылья, стабилизируя положение судна.
Одним из способов автоматического управления подъемной силой крыла является искусственная вентиляция. Подача воздуха на одну из сторон крыла приводит к изменению величины и характера распределения давления, а следовательно, и гидродинамической подъемной силы. Это дает возможность управлять подъемной силой на крыльях без изменения их геометрических характеристик и углов атаки.
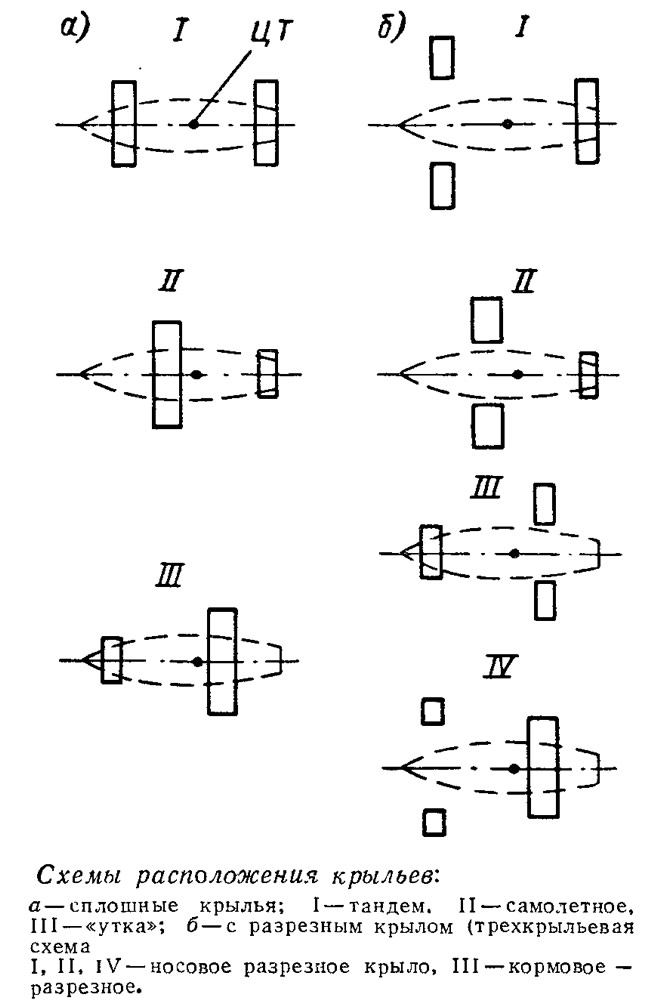
Для обеспечения продольной устойчивости применяют два или три подводных крыла, располагаемых по длине корпуса в нос и корму от центра тяжести. Наибольшее распространение в настоящее время получила система тандем, состоящая из двух крыльев, расположенных одно за другим. В системе тандем могут применяться два плоских малопогруженных крыла, два глу-бокопогруженных крыла, два К-образных крыла или носовое К-образкое, а кормовое плоское, и другие их комбинации. Примером применения системы тандем служат отечественные СПК, американские суда с глубокопогруженными крыльями и суда фирмы «Супрамар» с К-образными крыльями.
По распределению нагрузки, которую воспринимают носовое и кормовое крыло, различают собственно систему тандем, систему самолетного типа и систему типа «утка». Каждое из крыльев нормальной системы тандем несет около половины (40—60%) весового водоизмещения судна. У систем самолетного типа и системы «утка» главное несущее крыло воспринимает 80—90% нагрузки, а другое, малонагруженное крыло служит стабилизирующим. В самолетной системе главным является носовое крыло, в системе «утка» — кормовое.
Кормовое крыло движется в потоке воды, возмущенном носовым крылом, вследствие чего появляется дополнительная горизонтальная сила, которая в зависимости от относительной скорости может изменяться не. только по величине,.но и по направлению. В случае малопогружениых крыльев системы тандем их взаимодействие обуславливает дополнительный дифферент судна на корму.
Если результат взаимодействия крыльев оказывается неблагоприятным, носовое крыло выполняют раздельным — состоящим из двух симметричных частей, разнесенных от диаметральной плоскости к бортам. Расстояние между полукрыльями в поперечном направлении делается обычно не менее размаха другого крыла. Такая крыльевая система может применяться для любого случая распределения нагрузки между носовым и кормовым крыльями.
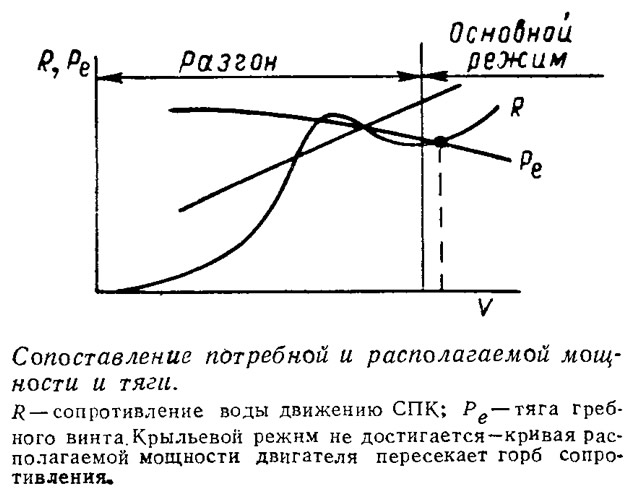
При выходе на крылья, как уже отмечалось, смоченная поверхность судна резко уменьшается, соответственно падает и сопротивление воды движению СПК. Корпус имеет максимальное сопротивление (специфический «горб» на кривой сопротивления) в диапазоне скоростей, составляющих 35—50% от полной. В ряде случаев сопротивление воды движению судна в районе «горба» оказывается большим, чем сопротивление на полном ходу. Чтобы преодолеть «горб» движитель должен развить дополнительную тягу, что требует существенного повышения мощности, передаваемой на гребной винт от двигателя. При некоторых условиях эксплуатации (волнение, обрастание крыльев) может оказаться, что тяга, создаваемая движителем, окажется недостаточной для преодоления горба сопротивления и разгон до полной скорости хода окажется невозможным.

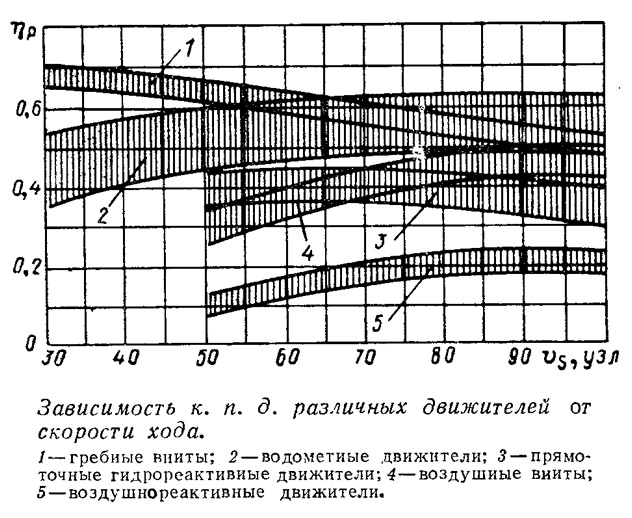
Наиболее широкое применение на СПК нашли водяные движители — гребные винты и водометы. С ростом скорости судна (свыше 60 км/час) на лопастях гребных винтов возникает кавитация, устранить которую практически невозможно. При дальнейшем развитии кавитации к. п. д. винта существенно падает. Но особенно вредна кавитация на лопастях рабочих колес водометного движителя. Как правило, она либо вообще недопустима, либо допускается лишь в течение короткого времени. Таким образом, при проектировании движителей СПК должно быть обращено особое внимание на преодоление «горба» сопротивления, то есть на создание достаточно большой тяги при промежуточных скоростях хода. Эта проблема возникает при проектировании любого двигательно-движительного комплекса и расчете ходкости СПК. Для решения ее в последнее время применяют движители с регулируемыми гидродинамическими характеристиками. Регулирование достигается путем поворота лопастей или их части, либо путем подачи воздуха на них (вентиляция лопастей).
Другие трудности, связанные с обеспечением высокой эффективности гребных винтов СПК, обусловлены наличием на ходу клиренса (зазора) между днищем судна и водной поверхностью. Необходимо обеспечить расстояние между осью гребного винта и днищем, равное сумме клиренса и заглубления оси винта под свободной поверхностью. Это обуславливает значительный угол наклона гребного вала и приводит к тому, что винт работает в условиях косого потока. Как показывает опыт, увеличение угла скоса потока на ходу судна свыше 15° приводит к заметному падению коэффициента полезного действия винта.

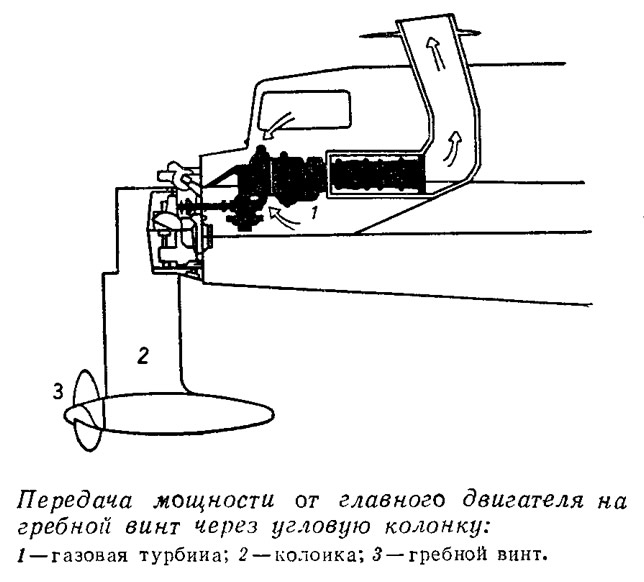
На морских судах на подводных крыльях, клиренс которых особенно велик, применяют Z-образные передачи, так называемые угловые колонки. Винт на колонке работает в прямом потоке и имеет значительно более высокий к. п. д.
Водометные движители уступают по эффективности (к. п. д.) гребным винтам при скоростях движения до 100 км/час. Но при больших скоростях, когда к. п. д. гребных винтов снижается из-за кавитации, водометные движители, рабочие колеса которых не кавитируют, оказываются достаточно эффективными. Расположение рабочих колес внутри корпуса существенно упрощает подвод мощности и позволяет отказаться от сложных угловых передач. Водометы обладают также лучшими акустическими качествами.
Несколько слов о двигателях. Так как на СПК необходимо обеспечить минимальный вес конструкции и энергетической установки, на большинстве крупных судов этого типа в последние годы применяются газотурбинные двигатели большой агрегатной мощности. На небольших СПК применяются легкие быстроходные дизели.
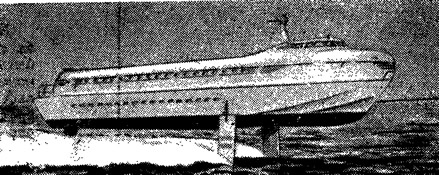
Какие же основные черты современных морских судов на подводных крыльях? В основном это суда с автоматически управляемыми крыльями (АУПК), такие, к примеру, как первый советский пассажирский катер с системой АУПК «Тайфун» (см. сборник №44). Он предназначен для перевозок пассажиров на морских линиях при волнении до 5 баллов. Водоизмещение судна 65 т, максимальная скорость хода 83 км/час, пассажировместимость 100 человек. Хотя катер не совершает пока регулярные пассажирские рейсы, его можно уже считать судном на подводных крыльях сегодняшнего дня. «Тайфун» успешно прошел испытания на тихой воде и в условиях взволнованного моря при высоте волны до 3 м.
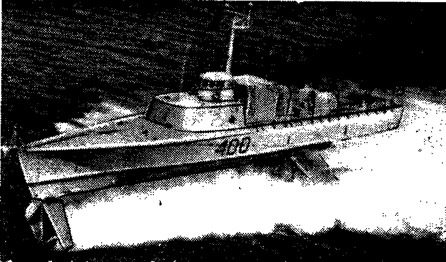
Обширные работы по созданию мореходных судов на подводных крыльях ведутся за рубежом и в первую очередь в США. Наиболее удачным из американских морских СПК оказался сторожевой катер «Тэкамкари». По водоизмещению и максимальной скорости; он близок к «Тайфуну» и имеет также полностью погруженные, автоматически управляемые крылья (с помощью закрылков). В качестве главных двигателей на обоих судах используются газовые турбины. Мощность главных двигателей — около 3500 л. с. Движителями «Тэкамкари» являются водометы (на «Тайфуне» — гребные винты с передачей мощности к ним через угловые колонки). «Тэкамкарн» послужил прототипом для целого ряда новых проектов гражданских и военных судов на подводных крыльях, разрабатываемых в США и некоторых западноевропейских странах. Водоизмещение этих судов колеблется в широком диапазоне от 50 до 500 т. Общими для всех их являются крыльевая схема типа «утка», система автоматического управления подводными крыльями и тип движителей. В США, например, разработай проект пассажирского парома на 300 чел., в Италии — проект ракетного катера «Свордфиш» водоизмещением 50 т, во Франции — проекты ракетного катера водоизмещением 120 т и пассажирского судна, рассчитанного на перевозку 200 человек и 15 автомобилей. Эксплуатационная скорость хода этих судов 75—80 км/час. Хорошие мореходные качества позволяют использовать их в условиях взволнованного моря с высотой волны до 3 м.
Наиболее крупным из построенных к настоящему времени крылатых судов является американский опытный корабль на подводных крыльях «Плэйнвью» водоизмещением 320 т. Испытания этого корабля, по замыслу конструкторов, должны были дать ответ на вопрос о возможности и оправданности постройки еще более крупных морских кораблей на подводных крыльях. «Плэйнвью» может выходить в море при высоте волны до 4,6 м. Не удивительно поэтому, что высота стоек полностью погруженных автоматически управляемых подводных крыльев превышает у него 7,5 м. Суммарная мощность двух газовых турбин (с передачей мощности на гребные винты) составляет 30000 л. с.
Выше уже говорилось, что одним из способов автоматического управления подводными крыльями является искусственная вентиляция. Система управления, основанная на этом способе, менее сложная и дорогая по сравнению с автоматической системой стабилизации движения посредством закрылков и поворотных крыльев. Искусственную вентиляцию можно успешно применить для крыльевых устройств уже построенных судов с относительно малыми затратами времени и средств. Новый метод уже был проверен на одном из судов типа РТ-50 фирмы «Супрамар», построенном в Норвегии. Как показали испытания, при движении на волнении крен уменьшился вдвое, дифферент — на 30%, вертикальные ускорения — в 2,5 раза. В последнее время система управления подъемной силой крыла посредством вентиляции используется на судах типа «РТ-150 МкIII», также спроектированных фирмой «Супрамар». Эти суда водоизмещением 165 т рассчитаны на перевозку 250 пассажиров и используются на прибрежных морских линиях при высоте волны до 3 м. .
Канадские конструкторы разработали оригинальную крыльевую схему корабля на подводных крыльях «Бра д’Ор» водоизмещением 200 т, предназначенного для действий в открытом океане. На этом корабле отсутствует сложная система автоматического управления несущими крыльями. Вентилируемое носовое крыло несет всего 10% общей нагрузки (схема «утка»). При движении на волнении это крыло, входя в волну, дифферентует корабль так, что на кормовом крыле, несущем основную нагрузку, угол атаки изменяется, судно «всплывает» и стабилизируется в продольной плоскости. Стабилизация в поперечной плоскости осуществляется благодаря крыльевым элементам, пересекающим поверхность воды. Как показали испытания, максимальная скорость хода в условиях волнения при высоте волны до 3 м составляет свыше 90 км/час (на тихой воде скорость превысила 110 км/час).
Хорошо зарекомендовал себя прн использовании на прибрежных морских линиях советский пассажирский катер на подводных крыльях «Комета-М» водоизмещением 57 т, рассчитанный на 116 пассажиров. Судно может эксплуатироваться в условиях волнения до 4 баллов. В 1971 г. состоялся переход «Кометы-М» вокруг Европы с заходом в 34 порта пятнадцати стран. Протяженность рейса составила свыше 20 ООО км. Судно отлично выдержало это серьезное испытание. Даже в условиях пятибалльного шторма поведение его было вполне удовлетворительным. Не удивительно, что после этого рейса в нашу страну стали поступать заказы на эти катера.
Мы рассказали лишь о нескольких сравнительно больших судах на подводных крыльях, которые уже построены, либо будут построены в ближайшие годы. Какими будут крылатые корабли будущего? Специалисты различных стран единодушно считают, что в настоящее время существуют все необходимые предпосылки для строительства крылатых судов водоизмещением 500—600 т. Более того, американские специалисты, например, заявляют, что корабль-вертолетоносец на подводных крыльях водоизмещением 4400 т может быть создан уже к 1980 г. и что принципиальных трудностей для этого не существует. Можно ожидать, что водоизмещение грузопассажирских СПК достигнет 1000 т и они будут использоваться на морских линиях протяженностью до 2000 км, успешно конкурируя с водоизмещающими судами. Скорости движения СПК будут расти. Сейчас они составляют 60—90 км/час, а в будущем достигнут 110—120 км/час. Конечно, рост водоизмещения и скорости СПК приводит к значительному увеличению мощности их главных двигателей. Например, мощность газовых турбин корабля американского проекта водоизмещением 540 т превысит 30000 л. с.
На крылатых морских судах получат дальнейшее развитие системы автоматического управления подводными крыльями с помощью закрылков и поворотных крыльев, а также с использованием вентиляции крыльев. В качестве движителей все шире будут использоваться водометы.
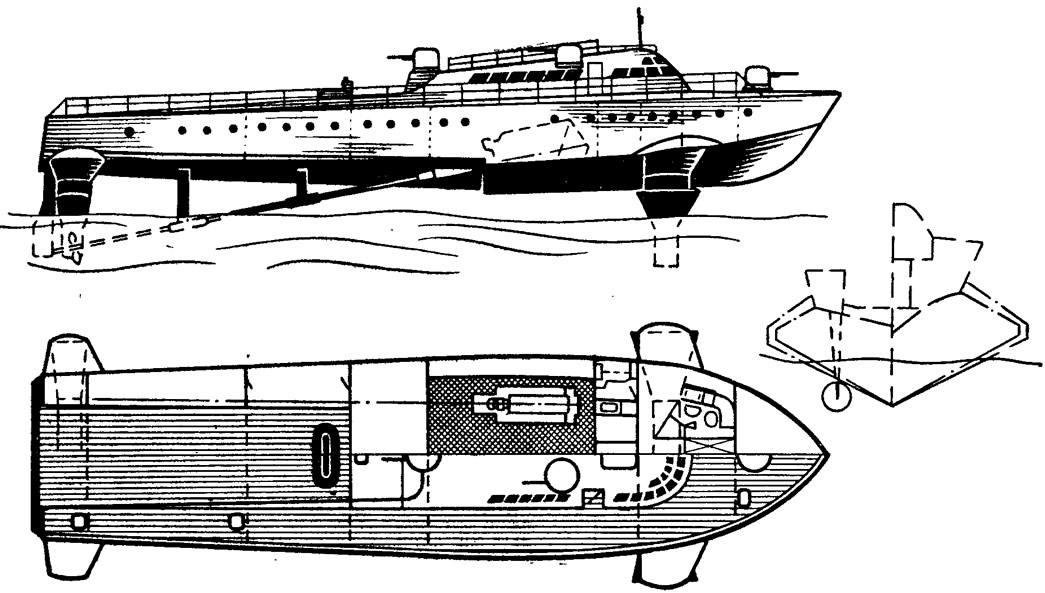
Один из возможных путей создания судов будущего, сочетающих в себе большое водоизмещение, достаточно высокую скорость и хорошую мореходность, конструкторы видят в создании судов с комбинированным принципом поддержания. Например, таких судов, которые состоят из подводной обтекаемой гондолы сравнительно большого водоизмещения, снабженной системой несущих крыльев, вертикальных стоек, пересекающих поверхность воды, и надводной части.