
Основные требования, предъявляемые к гоночному скоростному глиссеру, следующие:
1) глиссер должен иметь оптимальный корпус, обладающий высокими гидро- и аэродинамическими качествами;
2) движитель должен иметь достаточно высокий коэффициент полезного действия;
3) движение должно быть устойчивым во всем диапазоне скоростей.
Рассмотрим последовательно эти требования и условия их выполнения.
Оптимальный корпус
Наибольшей популярностью пользуются сейчас корпуса по трехточечной схеме Апеля. Бортовые спонсоны в носу и продольные щитки за спонсонами позволяют свести к минимуму взаимодействие между глиссирующими поверхностями и использовать аэродинамическую подъемную силу, действующую на корпус, которая на больших скоростях уже может привести к полному отрыву корпуса от воды.
Гидродинамическое качество корпуса определяется расположением и формой глиссирующих поверхностей, гидроаэродинамической формой корпуса, размерами и формой выступающих частей, весом, центровкой и ходовым дифферентом глиссера. Каждый из этих элементов следует рассматривать в тесной взаимосвязи с другими.
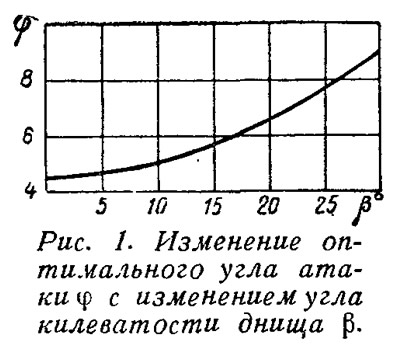
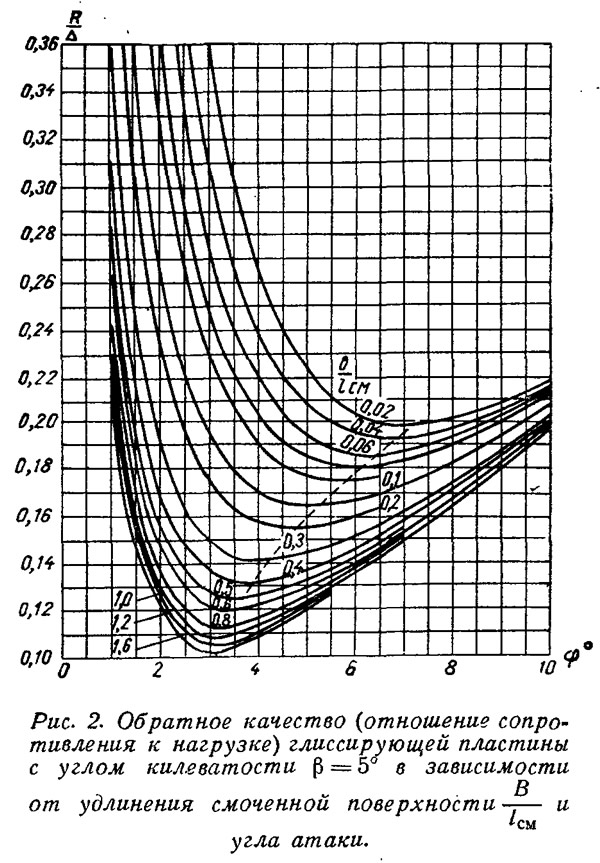
Наиболее важными параметрами являются соотношение смоченной длины и ширины, угол атаки глиссирующих плоскостей и угол килева-тости днища. Для глиссеров по трехточечной схеме Апеля в результате многочисленных экспериментов был определен оптимальный угол ходового дифферента 4,3—4,5° при угле внешней килеватости 0—5°. С увеличением килеватости растет оптимальный угол дифферента (рис. 1). Характер зависимости гидродинамического качества глиссера от относительного удлинения смоченной поверхности днища и угла атаки [2, 3] показан на рис. 2.
Чрезвычайно важно правильно отцентровать глиссер. Здесь можно рассмотреть варианты с кормовой и носовой центровкой. Для первого варианта легче обеспечить оптимальный дифферент; кроме того, гребной винт в этом случае работает в более благоприятных условиях. Однако на волнении движение такого глиссера становится неустойчивым — сказывается отрицательное воздействие аэродинамической подъемной силы. Более интересным и многообещающим представляется вариант глиссера с носовой центровкой.
С возрастанием скорости растет сопротивление выступающих частей (гребной вал, кронштейны, руль), которое при скорости свыше 100 км/час доходит до 35—40% общего сопротивления глиссера. Прорыв атмосферного воздуха по гребному валу и образование воздушной каверны за ним еще больше увеличивают этот процент. При подобном режиме обтекания сопротивление выступающих частей достаточно точно определяется формулой:
где СХ — коэффициент сопротивления выступающих частей, равный 0,5;
ρ — массовая плотность воды, равная 102 кг·сек2/м4;
υ — скорость глиссера, м/сек;
S — площадь проекции выступающей части на поперечную плоскость, м2.
Совершенно очевидно, как важно уменьшить эту составляющую сопротивления глиссера.
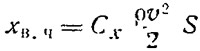
Рассмотрим силы, действующие на глиссер и определяющие его ходовой дифферент (рис. 3). При скорости свыше 100 км/час аэродинамическое сопротивление глиссера становится соизмеримым с гидродинамическим. Так, у рекордного глиссера «Синяя птица II» уже при скорости 240 км/час обе составляющие были равны по величине. Величина аэродинамического сопротивления существенно зависит от площади поперечного сечения глиссера и приближенно может быть определена по формуле:
где СХв — коэффициент аэродинамического сопротивления корпуса, равный 0,7÷0,8;
Ω — площадь проекции глиссера на плоскость шпангоута, м2;
υ — скорость глиссера, м/сек;
ρв — массовая плотность воздуха, равная 0,121 кг·сек2/м4.
Для глиссера с хорошей аэродинамической формой коэффициент сопротивления СХв может иметь меньшие значения.
Важное значение при увеличении скорости приобретают величина аэродинамической подъемной силы и положение точки приложения ее по длине. Корпус, спроектированный с учетом максимального использования аэродинамической подъемной силы, напоминает крыло малого удлинения. Продольные щитки за спонсонами трехточечного глиссера, продолженные до транца, играют роль концевых шайб крыла, снижающих потери аэродинамической подъемной силы из-за поперечного растекания воздуха. Очевидно, для аэродинамического качества такого «крыла» важна также форма его верхней поверхности. Однако расчет аэродинамической подъемной силы и координат точки ее приложения затруднителен. Эти характеристики можно получить в результате продувок моделей глиссеров в аэродинамической трубе.
Следует иметь в виду, что при движении глиссера на волне или при потере продольной устойчивости движения мгновенные значения углов атаки корпуса могут принимать большую величину; тогда возросшая аэродинамическая подъемная сила приводит к периодическому отрыву носовых спонсонов от воды или даже к полному отрыву корпуса и прыжкам глиссера (дельфинирование). Чтобы избежать этого, центр тяжести глиссера приходится смещать в нос, что в свою очередь может привести к уменьшению угла ходового дифферента ниже оптимального значения, т. е. к росту гидродинамического сопротивления.
При движении глиссера с очень большой скоростью все большую роль играет поперечная сила, развивающаяся на гребном винте, работающем в косом потоке (рис. 3).
Вертикальная проекция упора Р и поперечная сила R создают момент, уменьшающий дифферент глиссера.
Методика приближенного расчета поперечной силы на гребном винте, работающем в косом потоке, приведена в работе [1]. Поперечную силу на винте можно использовать для уменьшения смоченной поверхности и, следовательно, сопротивления глиссера.
Для глиссера с передней центровкой носовой редан несет 80—90% всей нагрузки (при скорости свыше 100 км/час) и поперечная сила на гребном винте столь велика, что смоченная поверхность кормового редана существенно уменьшается. Может произойти даже полный отрыв кормы от воды. При этом большая часть гребного вала и кронштейна оказывается над поверхностью воды, и сопротивление выступающих частей значительно уменьшается. Однако желаемый эффект можно получить, только учтя ряд особенностей. Во-первых, при наклонном гребном вале отрыв кормы от воды неизбежно приводит к прорыву воздухе на винт, поэтому приходится использовать полупогруженный винт, проектирование которого представляет весьма трудную задачу. Во-вторых, в результате отрыва кормы от воды угол атаки глиссера может стать значительно меньше оптимального. Наконец, при оголении лопастей гребного винта, а также при движении даже на небольшой волне на гребной винт действуют периодиче-.ские силы, которые могут привести к потере продольной устойчивости движения.
Движители
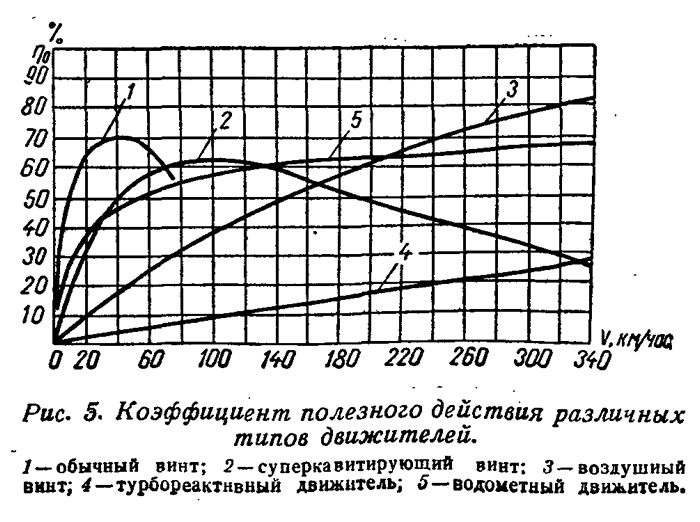
Правильный выбор гребного винта для гоночного глиссера имеет не менее важное значение, чем отработка оптимального корпуса. При скорости свыше 70 км/час серьезной проблемой становится кавитация винта. Физическая сущность кавитации гребного винта состоит в том, что при достаточно большой скорости обтекания лопасти давление на ее засасывающей поверхности падает ниже некоторой критической величины (давление насыщенных паров воды). При этом (рис. 4) в зоне Наиболее низкого давления образуются на поверхности лопасти пузыри паров воды, которые с увеличением скорости обтекания сливаются, образуя каверну. Каверна с дальнейшим ростом скорости охватывает все большую поверхность засасывающей стороны лопасти — наступает вторая стадия кавитации. При этом гидродинамические характеристики гребного винта существенно изменяются. Работа винта в косом потоке (из-за наклона гребного вала) приводит к еще большему развитию кавитации. Из рис. 5 видно, что уже при скорости свыше 90 км/час коэффициент полезного действия широколопастного гребного винта с сегментной профилировкой падает более чем на 20%. При скоростях движения свыше 90—100 км/час необходимо использовать суперкавитирующие гребные винты, обеспечивающие более высокий к. п. д., чем обычные.
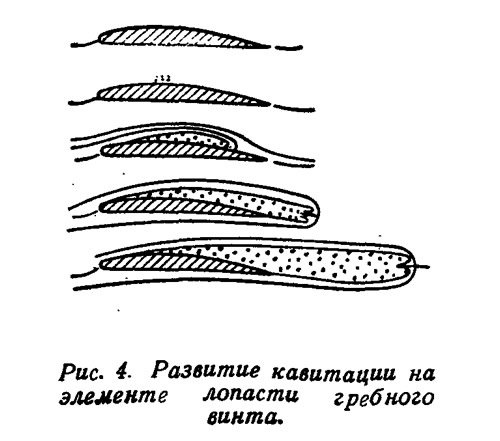
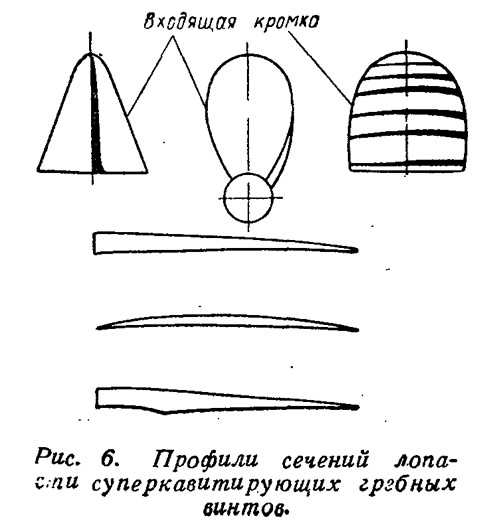
В режиме суперкавитации каверна охватывает всю засасывающую сторону лопасти винта и продолжается за винт. Каждый элемент лопасти работает только нагнетающей стороной (рис. 4). Элементы лопасти суперкавитирующего винта должны иметь такой профиль, чтобы каверна была устойчивой при расчетной скорости движения и имела минимальную толщину, чтобы обеспечить наименьшее сопротивление.
В настоящее время разработано несколько серий суперкавитирующих гребных винтов, имеющих различную профилировку лопасти. Основные профили показаны на рис. 6. Наиболее часто применяют профили клиновидного типа.
Нижний предел скорости, при которой выгодно использовать суперкавитирующий гребной винт, составляет 70—75 км/час. Верхнего предела скорости для суперкавитирующих гребных винтов не существует; в каждом отдельном случае он определяется прочностью лопастей, ибо при сверхвысоких скоростях движения возможно разрушение острых кромок лопасти. С ростом скорости, когда осадка и смоченные поверхности днища глиссера минимальны, гребной винт часто оказывается вблизи поверхности воды и в некоторых случаях даже пересекает ее.
При этом происходит прорыв воздуха к винту в область пониженного давления на лопасти, условия работы и гидродинамические характеристики винта существенно изменяются. Понижается к. п. Д. гребного винта; на элементы лопасти действует переменная во времени подъемная сила, которая может явиться причиной потери устойчивости движения глиссера. Прорыву атмосферного воздуха на гребной винт в значительной степени способствует наклонный гребной вал, плавное обтекание которого на большой скорости оказывается невозможным. За гребным валом образуется каверна, выходящая в атмосферу. Атмосферный воздух распространяется по каверне к винту, и режим обтекания лопастей винта нарушается.
Как избежать указанных явлений? Во-первых, можно заменить наклонный гребной вал угловой колонкой, позволяющей опустить винт достаточно глубоко. Чтобы предотвратить прорыв воздуха по обтекателю колонки, над винтом устанавливают горизонтальные шайбы (антикавитационные плиты), которые, кроме того, улучшают условия работы винта.
Другим путем является использование полупогруженных винтов, рассчитанных специально для работы в условиях пересечения свободной поверхности воды. Однако в настоящее время нет надежной методики расчета таких винтов, и их подбирают на основании экспериментальных данных. Удачно подобранный полупогруженный гребной винт может обеспечить значительное снижение полного сопротивления глиссера за счет уменьшения сопротивления погруженных выступающих частей.
На рис. 5 были приведены значения к. п. д. в зависимости от скорости для различных типов движителей. Как видно из рисунка, начиная с определенной скорости к. п. д. воздушного винта и водомета становятся выше, чем суперкавитирующего гребного виита. Но применение воздушного винта на гоночном судне ограничено размерами лопастей, которые с ростом скорости и потребной мощности становятся слишком большими, а мощные водометы слишком тяжелы для использования на скоростных гоночных судах.
Воздушно-реактивные движители благодаря небольшому весу успешно применяются на сверхскоростных гоночных судах, несмотря на сравнительно низкий к. п. д.
Устойчивость движения
Довольно часто движение спортивного глиссирующего судна становится неустойчивым.
В большинстве случаев теряется продольная устойчивость: глиссер начинает совершать вертикальные колебания или периодически изменять свой дифферент; иногда оба указанных явления наблюдаются одновременно. Ходовые характеристики глиссера резко ухудшаются. Многие катастрофы сверхскоростных глиссеров объясняются именно потерей устойчивости движения.
Устойчивость движения глиссеров характеризуется зависимостью угла атаки от скорости.
Информация об изображении
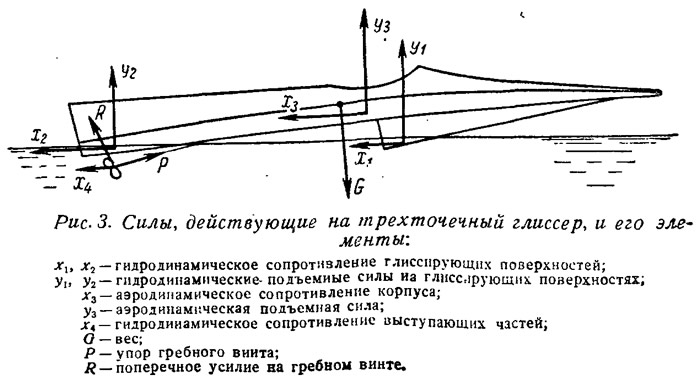
Рис. 7. Зоны устойчивости движения глиссера в координатах угол атаки — скорость
Границы 1, 2, 3 (рис. 7) областей неустойчивого движения характеризуют наиболее вероятные виды потери устойчивости реданного глиссера.
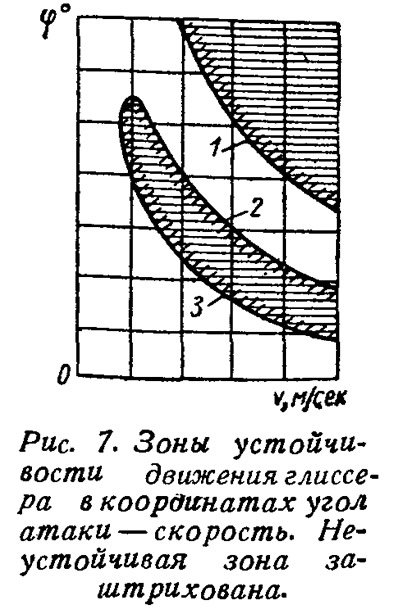
Рис. 7. Зоны устойчивости движения глиссера в координатах угол атаки — скорость
Одним из основных факторов, определяющих устойчивость движения глиссера, является центровка. В случае кормовой центровки продольная неустойчивость вызывается в основном вторым реданом и характеризуется границей 1. Этот вид неустойчивости наблюдается при сравнительно больших значениях ходового дифферента и проявляется в резких вертикальных и медленных угловых колебаниях глиссера. При достаточно больших значениях угла Дифферента спонсоны могут отрываться от воды; при этом усиливаются угловые колебания, а аэродинамическая подъемная сила на корпусе достигает столь большой величины, что движение глиссера сопровождается прыжками.
Другой причиной неустойчивости являются угловые колебания при движении по взволнованной поверхности. Выйти из неустойчивого режима движения можно или изменив центровку за счет перемещения гонщика в нос, если это возможно, или снизив скорость.
Для глиссера с передней центровкой характерна зона неустойчивости с границами 2 и 1. В этом случае кормовой редан, неся незначительную нагрузку, в некоторых случаях на расчетной скорости совсем выходит из воды, и глиссер продолжает движение только на носовых спонсонах. Угол дифферента при этом может принять критические значения, соответствующие второй зоне неустойчивого движения.
Даже при движении на двух реданах различные факторы (аэродинамическая подъемная сила; волнение; переменная во времени поперечная сила на гребном винте, работающем вблизи свободной поверхности и периодически пересекающем ее) могут привести к потере продольной устойчивости. Колебания При этом сравнительно медленные и их можно успокоить, несколько увеличив дифферент, но не настолько, чтобы при этом достигалась граница 1. На рис. 7 этому виду неустойчивости соответствуют' границы 2 и 3. Границе 3 соответствуют еще меньшие значения дифферента, а частота угловых колебаний больше, поэтому глиссер зарывается носовой частью в воду. Как для первой, так и для второй зоны неустойчивости существуют некоторые критические значения скорости, ниже которых движение становится устойчивым. Из сказанного ясно, что неустойчивость гоночного трехточечного глиссера — очень сложное явление, поэтому, не имея результатов модельных испытаний в опытовом бассейне и аэродинамической трубе, невозможно привести формулы, которые бы с достаточной точностью учитывали все обстоятельства. Тем не менее, зная основные факторы, вызывающие неустойчивость, и изменяя некоторые параметры, например центровку или углы атаки глиссирующих поверхностей, можно добиться устойчивого глиссирования во всем диапазоне движения.
Литература
- 1. Ю. М. Садовников, «Некоторые особенности расчета ходкости судов на подводных крыльях», «Судостроение», 1962, № 11.
- 2. Murray А. М., «The Hydrodynamics of Planning Hulls», SNAME Transactions, vol. 50, 1950.
- 3. Du Cane Peter, «High speed Small Craft, 1964 (3-е издание).