
Почти всю жизнь я проработал в судостроительной промышленности. Последние лет тридцать я пристально изучал вопросы, связанные с созданием новых движителей. В моих наблюдениях мне, кажется, удалось выявить ряд ошибок, укоренившихся в судостроении и влекущих за собой нерациональное использование энергоресурсов.
Уже лет двести тому назад стало ясно, что как весло, так и гребное колесо менее эффективны, чем движительные "приспособления" рыб. Копируя их хвостовой плавник, инженеры и не заметили, как получили гребной винт. Его совершенствовали, усложняли, под него подгоняли теории, а винтовое судно и поныне продолжает оставаться недостаточно эффективным, поскольку и его движитель уступает созданному природой. Совершенствование гребного винта — не решение проблемы, а лишь постоянное напоминание о существовании "Парадокса Грея" (см., например, статьи Б.Шереметова и Ж.Грушанской в "КиЯ" №85). Но как можно скопировать движительные приспособления дельфинов и рыб, когда до сих пор не выяснено, как именно они работают? До двадцатых годов ХХ века существовала так называемая плавниковая теория перемещения рыб. На смену ей пришла волновая теория. Теории были созданы, но практикой, опытом справедливость их доказать не удавалось.
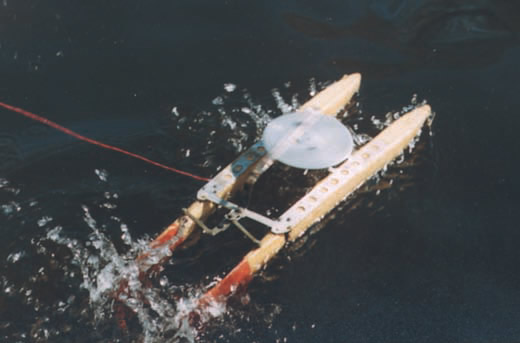
Однажды мне встретилось сообщение об американском инженере Г.Боуласе, построившем небольшой катамаран, сочлененные корпуса которого совершают колебательные движения, подобные движениям дельфина при плавании. При движении "катамарана-дельфина" не было ни кильватерной струи, ни других значительных возмущений воды. Этой особенностью работы движителя сразу же заинтересовались в центре подводной войны США. Патент Боуласа несколько позже, уже будучи рассекреченным, был противопоставлен одной из моих заявок. Надежд американцев эти разработки не оправдали, так как в их основу была заложена ошибочная, на мой взгляд, волновая теория перемещения рыб. Тем не менее, они продолжали искать и в других направлениях.
Мною много лет высказывается мнение, что движитель типа рыбий хвост именно отталкивается от водной среды, при определенных условиях приобретающей свойства твердого тела, а весь механизм движения укладывается в теорию клина-ускорителя.
На мой взгляд, именно клин-ускоритель как физический механизм заложен в основу экономичного плавания многих морских обитателей.
Осмелюсь заметить, что для преодоления расстояний природа наделила дельфинов, рыб, пингвинов приспособлением, равным по значению величайшим изобретениям человека, какими являются весло-ускоритель, ласты, коньки и велосипед. Эти приспособления позволяют человеку очень рационально, импульсами прикладывать свою силу и, несколько проигрывая в силе, выигрывать в скорости, при минимальных затратах энергии преодолевать значительные расстояния. И если со скоростью 10 м/с человек может бежать дистанцию только в 100 м, то на коньках уже со скоростью 11 м/с спортсмен преодолевает расстояние в 10 000 м, а оседлав велосипед, способен со скоростью 13 м/с преодолевать уже десятки километров.
Вооружившись принципом действия клина-ускорителя, рассмотрим следующую принципиальную схему движения в воде. Приступая к рассмотрению приведенного здесь рисунка, иллюстрирующего работу предлагаемого мною движителя, заметим, что аналогичные рисунки, оставленные коньками конькобежца, можно наблюдать на чуть припорошенном снегом катке. Примерно такой же рисунок-след оставляет и лыжник, освоивший коньковый ход — очень эффективный и экономичный способ движения. Но на водном транспорте продолжают преодолевать бескрайние водные просторы не "коньковым ходом", а способом "елочка" или "лесенка", при помощи которого на лыжах поднимаются по склонам гор. Именно так, способом "лесенки-елочки" и ходят все винтовики.
Большинство же рыб и китообразных давным-давно освоили "коньковый ход". Именно этот способ заложен в основу предлагаемого движителя, выполненного в виде хвостового плавника рыб.
Поступательное движение рыбы обеспечивается своеобразным эффектом, возникающим при колебаниях хвостового плавника, который как бы соскальзывает со "щеки" водяного клина. В случае достаточно быстрого (импульсного) приложения силы со стороны плавника водяной клин приобретает свойства твердого тела, т.е. играет роль именно клина-ускорителя, с которого соскальзывает упругий гибкий плавник.
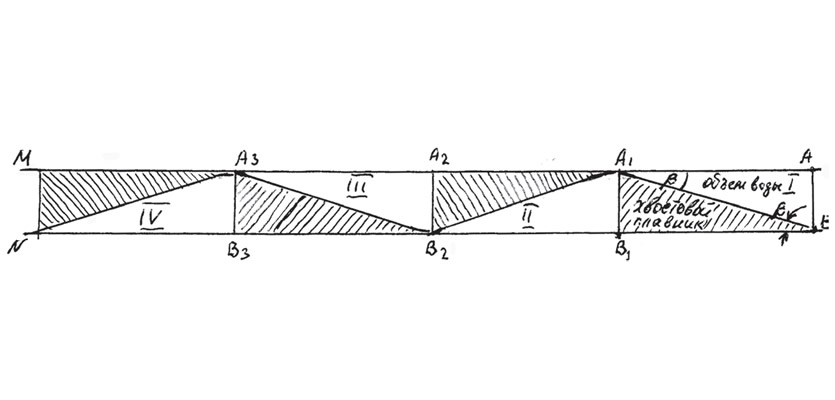
В рассматриваемой проекции хвостовой плавник рыбы за один цикл, совершая колебания между прямыми MA и NA, перемещается вдоль отрезков BA1 и A1B2, проходя при этом путь АД2.
Хочется верить, что мне удалось предложить такой механизм, который действительно обладает удивительными характеристиками, присущими большинству обитателей морских глубин.
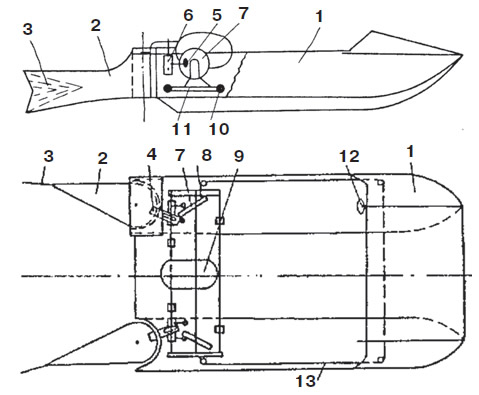
Я запатентовал свое изобретение (Патент № 2081770 от 29.07.1992 г), которое состоит в следующем. С кормовой частью корпусов судна-катамарана шарнирно соединены плавниковые движители, работающие в противофазе. Движитель-плавник 2 имеет коническую или клинообразную в плане форму. Его острый кормовой конец, подобно хвостовому плавнику рыбы, плавно переходит в гибкую и упругую армированную пластину 3, причем в любом положении движитель в целом образует с корпусом судна 1 единую обтекаемую систему.
Работает катамаран следующим образом. При включении двигателя и вращении вала 8 с косыми шайбами 7 последние через бочкообразные ролики 5 приводят в движение толкатель 6 и рычаги 4, которые и вызывают рабочие колебания плавникового движителя. Шайбы установлены одна относительно другой так, чтобы плавники колебались в противофазе. При повороте рулевой колонки 12 подмоторная рама 11 перемещается по направляющим 10 под действием тяги 13, смещаясь от оси симметрии судна к одному из бортов и смещая плавники к тому же борту, что обеспечивает маневрирование судна.
Краткое послесловие: Сотрудники редакции испытали действующую модель судна-катамарана по патенту Г.Семенова. К сожалению, точным лабораторным опытом это назвать нельзя, но можно отметить, что по одному из петербургских каналов модель с пружинным заводным механизмом бегала довольно шустро.
Мы попросили прокомментировать изобретение Г. Семенова двух специалистов-гидромехаников, преподающих в Морском Техническом Университете ("Корабелке")
В.Б. Амфилохиев, докт. техн. наук, проф. СПбГМТУ:
Рукопись Г/А. Семенова посвящена, в основном, предложению нового принципа для проектирования оптимальных судовых движителей. Остановлюсь на конкретных замечаниях.
Первое. Связывать парадокс Грея именно с дельфинами в настоящее время не стоит. Автор и сам отмечает, что дельфин — не слишком быстроходный водный организм. Кроме того, анализ наблюдений, на которых основывался Грей, показывает, что наибольшие скорости фиксировались у дельфинов, "оседлавших" волну. В таких условиях большие скорости развивает и человек-серфингист. При движении без волны скорость дельфина трудно определить с высокой точностью, а ошибка всего в 20-25% "снижает" потребную для движения мощность, грубо говоря, вдвое.
Далее. Схема, объясняющая работу движителя (по-видимому, плавникового, декларируемого в качестве оптимального) с помощью модели "клина-ускорителя" достаточно интересна, но непонятно, как можно ее усовершенствовать в целях использования для практических расчетов конкретных движителей. Кстати, схему прямоугольника АВВ1А1 можно приспособить и для объяснения работы любого участка движения лопасти винта. При этом будет отсутствовать изменение направления движения, так как винт вращается все время в одну сторону. А, следовательно, вблизи точек А1, В2 и т.д. не будут возникать вихри, создание которых увеличивает потери полезной энергии. Непонятно также, почему автор ограничил свой рисунок (и, как следствие, — эффективность) соотношением В1В=2АВ. Лучше было бы, например, В1В= 10АВ. Однако в этом случае клин оказался бы столь пологим, что тело "отказалось" бы с него соскальзывать. Почему? За счет наличия трения и уменьшения составляющей, создающей тягу. Кстати, сопротивление трения составляет огромную долю сопротивления судна, но даже не упоминается автором.
М.А. Басин, докт. техн. наук, проф. СПбГМТУ:
Предложенная автором модель взаимодействия тела с жидкостью, на которой он строит свою схему, хотя и совпадает с воззрением И.Ньютона, которые затем оказались ошибочными для почти несжимаемой жидкости, коей является вода, но не дает и не может дать никаких количественных оценок для сил, действующих на движитель, а без таких оценок не может приниматься всерьез как новая модель и тем более сравниваться с существующими. То есть если автор хочет, чтобы его модель была признана, он должен потратить усилия на ее математизацию.
Добавлю. Все движители, которые рассматривает автор: шест, весло, гребное колесо, гребной винт и т.д. являются реактивными, то есть движителями, упор которых создается за счет отбрасывания масс внешней среды — либо воды, либо воздуха, либо Земли в случае шеста. Автор статьи прав, что чем меньше скорость, с которой отбрасывается назад внешняя по отношению к движителю среда, тем выше коэффициент полезного действия движителя. Это основной вывод теории идеального движителя, придуманного еще Рэнкиным.
Однако имеется существенное отличие между гребным винтом и другими движителями, упомянутыми автором: веслом, хвостом рыб, гребным колесом. Если гребной винт является движителем, создающим в идеале постоянный упор (движителем непрерывного типа), то все остальные типы движителей являются движителями с переменным во времени упором, что требует для их оптимизации и конструктивного оформления решения более сложных задач. Это, по-видимому, главная причина, почему гребной винт вытеснил все другие типы движителей. Однако это не значит, что движители прерывистого типа в гидродинамическом плане всегда хуже гребного винта. Недаром движители машущего типа все время находятся в центре внимания ряда исследователей и проектировщиков. С этой точки зрения грамотное теоретическое сопоставление движителей прерывистого типа и движителей непрерывного действия между собой и оценка их сравнительной эффективности представляет собой интереснейшую проблему, интуитивно очень хорошо прочувствованную Георгием Александровичем Семеновым.