При управлении движением судна на море часто возникает задача его временной остановки или фиксации на ограниченной акватории. Постановка на якорь не везде возможна, и приходится маневрировать на малой скорости, компенсируя дрейф. При развитом волнении эта задача еще более усложняется из-за опасности поставить судно лагом к волне, выноса на мель, скалы и т.д. Для снижения скорости дрейфа и выигрыша во времени иногда применяется плавучий якорь, действующий по принципу парашюта. Он как бы цепляется за воду на тех глубинах, где она уже сравнительно неподвижна, и разворачивает судно носом к опасным волнам. Однако ясно, что для фиксации судна относительно дна надо его не удерживать, а буксировать навстречу ветровому сносу и течению. Как это сделать?
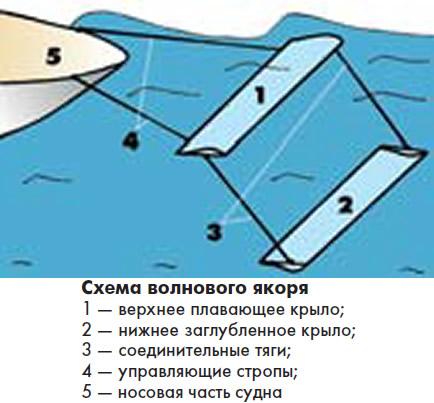
Для решения данной задачи автором создано и испытано устройство под названием "Движитель, использующий энергию волн" (Патент. RU №2154002). Оно экспонировалось на Всемирной выставке изобретений "Эврика-2001" в Брюсселе и удостоено серебряной медали. В самом простом варианте исполнения (см. схему) устройство напоминает крылья биплана, соединенные двумя длинными гибкими тягами. Легкие крылья с размахом 2 м и хордой 0.6 м выполнены из тонкого специально профилированного поликарбоната. Верхнее крыло имеет небольшую положительную плавучесть и соединяется с носом судна двумя управляющими стропами. Нижнее крыло — с отрицательной плавучестью и висит под верхним на глубине 2.2 м с заданным углом атаки.
Оставляя пока в стороне сложности гидромеханики, дадим элементарное описание работы такой системы на взволнованной поверхности моря. Набегающие волны поднимают и опускают верхнее крыло, которое посредством тяг вынуждает нижнее совершать возвратно-поступательные колебания в вертикальном направлении на той глубине, где вода почти неподвижна. Нижнее крыло подвешено таким образом, что вертикальные смещения его задней кромки отстают по фазе от смещений передней кромки и возникают дополнительные угловые колебания. Та же динамика отмечается, например, при работе хвостового плавника кита. Соответственно, и результат тот же — возникает так называемая пропульсивная сила, отклоняющая вперед нижнее крыло. Через тяги, верхнее крыло и управляющие стропы усилие передается судну и обеспечивает его медленную буксировку. При отсутствии волн такая система не становится обузой, а работает как обычный плавучий якорь.
Перед тем как продолжить более подробный рассказ о волновом якоре, обратимся к истории вопроса. Первые патенты на такие движители появились еще в конце XIX в. В журнале "КиЯ" (№126 за 1987 г.) Ю.Ф. Сенькин в статье "Движет судно энергия волн" дал обзор изобретений по этой теме. В журнале "Судостроение" (№6 за 1936 г.) можно найти замечательную статью профессора Г.Е. Павленко "Использование энергии качки на волнении для движения судов" с рецензией легендарного академика А.Н. Крылова.
Почему же, несмотря на заманчивость и внешнюю простоту, в морской практике подобные конструкции пока не встречаются? Причин много, но отметим одну, очень существенную. Любое крыло, в том числе машущее, становится эффективным только при быстром движении вследствие квадратичной зависимости подъемной силы от скорости потока. Если судно уже имеет достаточно быстрый ход и сохраняет килевую качку, то заглубленное машущее крыло иногда помогает движению, а иногда становится обузой.
Возвращаясь к более подробному описанию работы волнового якоря, напомним, что он призван действовать в медленных переменных потоках, со скоростями порядка 1 м/с. Если бы его нижнее крыло двигалось только как китовый плавник, то создаваемый им упор был бы недостаточен. Реальное движение нижнего крыла скорее напоминает поведение крыльев птицы, когда она хочет оставаться в воздухе почти на месте. Заметно, что ей приходится энергично махать крыльями по сложной петлеобразной траектории, включающей и горизонтальные смещения, а также использовать необычно крутые углы атаки. Такое искусное управление крыльями позволяет птице резко увеличить скорости набегающего потока. В волновом якоре нижнее крыло подвешено таким образом, что, попадая в поток, направленный сверху, оно резко устремляется вперед по дугообразной траектории, изменяя в пути и угол атаки. Как показали испытания и подводные киносъемки, горизонтальная составляющая скорости крыла примерно в 5 раз превосходит вертикальную. Когда набежавшая волна уходит, крыло как бы пятится назад, двигается в обратном направлении и завершает свой цикл.
До сих пор верхнее крыло упоминалось лишь в качестве своеобразного поплавка, но это упрощает его реальную функцию. Естественным источником вертикальных колебаний могла быть качка самого судна. Однако, как показывают усредненные расчеты, лишь десятая часть энергии набегающих волн трансформируется в качку. Остальная энергия теряется в виде отраженных и прошедших под килем волн или рассеивается в виде вихрей, брызг и т.д. Поэтому основной функцией верхнего крыла является оптимальное преобразование энергии волн в работу всей системы. Его параметры должны быть согласованы с характеристиками взволнованной поверхности, а собственная частота колебаний системы близка к частоте максимума в спектре волнения. Дополнительной функцией верхнего крыла является расположение всей системы перпендикулярно набегающему фронту наиболее энергонесущих волн. С помощью управляющих строп на борту можно корректировать ориентацию обоих крыльев по азимуту и изменять направление движения судна.
В процессе разработки испытано несколько вариантов конструкции волнового якоря. В одном из них вместо нижнего крыла применялась гидродинамическая решетка. Она была сформирована несколькими гибкими профилированными лопастями, расположенными одна под другой и связанными гибкими нитями. Каждая лопасть в такой конструкции работает уже описанным способом. На фотографии показана гидродинамическая решетка после проведения морских испытаний.
В первых экспериментах на Ладожском озере в качестве модели верхнего крыла использовалась легкая байдарка. С ее борта в прозрачной воде озера было удобно анализировать сложную динамику заглубленного крыла в условиях развитого волнения. Впоследствии испытания опытных образцов водного якоря проводились на морском побережье с борта небольшой яхты. Все перемещения системы крыльев фиксировались подводной видеокамерой.
Заметим, что волновой якорь, работая на поверхности моря, поглощает существенную часть энергии набегающих волн. За его "спиной" образуется область своеобразной тени, в которой волнение незначительно. Находясь именно в этой области, судно испытывает меньшую качку. Функция успокоителя качки может стать для данного устройства основной, особенно в штормовом море. В этом году планируется выпустить опытную серию волновых якорей, адаптированных по своим параметрам к конкретным судам.

- Главная
- Консультации
- Полезные устройства
- 2002 год
- Волновой якорь, успокаивающий качку
Подкатегории раздела
Полезные устройства
Полезные советы
Улучшение судов
Улучшение моторов
Опыт эксплуатации
Техника плавания
Разбор аварий
Рыболовам
Поделитесь информацией
Похожие статьи
Полезные мелочи: поручень, ящик, якорь, парус, ремонт такелажа
За рубежом: якорь, плот, статистика, рекорд, судно, джонки...
Полезные мелочи: петля, якорь, тележка, помпа, кнехт...
Полезные мелочи: замок, шлифовка, якорь, пеленгатор, бензобак...
Сообщения: спасатели, крысы, царь-якорь, взрыв, реклама...
Полезные мелочи: трап, кронштейн, якорь, бензин, пульверизатор...
Сообщения: броненосец, якорь, эхолот, рыболов, храбрость...
Полезные мелочи: чашка, шуруп, скоба, якорь, примус, кранец...
Сообщения: хлеб, прогулка, слава, ураган, якорь, стихия, капитан...
Сообщения: канал, якорь, криоланг, пароход, парашютист, река...
Полезные мелочи: эжектор, складной якорь, пропитка тента...
Полезные мелочи: свечной наконечник, якорь, пеленгатор, дальномер...
Сообщения: жадность, автоматика, якорь, опасный груз, промысел...
Полезные мелочи: якорь, спуск лодки, багажник, ткань, наконечник...
За рубежом: якорь, плот, статистика, рекорд, судно, джонки...
Полезные мелочи: петля, якорь, тележка, помпа, кнехт...
Полезные мелочи: замок, шлифовка, якорь, пеленгатор, бензобак...
Сообщения: спасатели, крысы, царь-якорь, взрыв, реклама...
Полезные мелочи: трап, кронштейн, якорь, бензин, пульверизатор...
Сообщения: броненосец, якорь, эхолот, рыболов, храбрость...
Полезные мелочи: чашка, шуруп, скоба, якорь, примус, кранец...
Сообщения: хлеб, прогулка, слава, ураган, якорь, стихия, капитан...
Сообщения: канал, якорь, криоланг, пароход, парашютист, река...
Полезные мелочи: эжектор, складной якорь, пропитка тента...
Полезные мелочи: свечной наконечник, якорь, пеленгатор, дальномер...
Сообщения: жадность, автоматика, якорь, опасный груз, промысел...
Полезные мелочи: якорь, спуск лодки, багажник, ткань, наконечник...
Волновой якорь, успокаивающий качку
Год: 2002. Номер журнала «Катера и Яхты»: 179 (Все статьи)

ПРЕДЫДУЩИЕ СТАТЬИ
Испытания надувной РИБ моторной лодки «Кобра»
Испытания летающей лодки компании «Поларис Моторс»
Механизм бинарного параллелограмма
Навигационная система NAVNet японской фирмы «Furuno»
Кто обеспечит безопасность в Невской дельте
Мир яхтенного чартера (аренда яхты)
Трагедия американского парохода «Истленд»
Ловля рыбы на реке Коппи в Хабаровском крае
Соревнования по ловле рыбы «Хищник-2001» и «Золотой лосось II»
Испытания моторной лодки «Фрегат-420 РИБ»
Тестирование системы электронной картографии «Tsunamis`99»
Выбор надувной мотолодки «Лидер» в вопросах и ответах
Весенний ремонт яхты и подготовка к навигации
Найди себе приключение, или экстремальный чартер
Лопнувший миф или кое-что о расходе топлива
Испытания летающей лодки компании «Поларис Моторс»
Механизм бинарного параллелограмма
Навигационная система NAVNet японской фирмы «Furuno»
Кто обеспечит безопасность в Невской дельте
Мир яхтенного чартера (аренда яхты)
Трагедия американского парохода «Истленд»
Ловля рыбы на реке Коппи в Хабаровском крае
Соревнования по ловле рыбы «Хищник-2001» и «Золотой лосось II»
Испытания моторной лодки «Фрегат-420 РИБ»
Тестирование системы электронной картографии «Tsunamis`99»
Выбор надувной мотолодки «Лидер» в вопросах и ответах
Весенний ремонт яхты и подготовка к навигации
Найди себе приключение, или экстремальный чартер
Лопнувший миф или кое-что о расходе топлива
ТЕКУЩАЯ СТАТЬЯ
Волновой якорь, успокаивающий качку
СЛЕДУЮЩИЕ СТАТЬИ
Перевозим картоп-лодку на автомобиле правильно
Азы троллинга для начинающих рыболовов
Испытания канадской аэролодки «Хаски»
Испытания надувной РИБ мотолодки «Кайман» с алюминиевым корпусом
Испытания РИБ мотолодок «Орион-8ПМ» и «Орион-60 Спорт»
Маленькие хитрости для капитана парусной яхты
Мини-компьютер КПК + GPS-приемник
Компьютерный яхтенный симулятор «Virtual Skipper»
Гибель трехмачтового барка «Роял Чартер»
Вечный руль для парусной яхты «Ассоль»
Поддержание покрытий на самодельных судах
Построить мини-крейсер по силам каждому
Скоростной катер-перехватчик Фабио Буцци «FB RIB 33»
Испытания катеров «Camaro Even» и «Gagliardo 34»
Испытания катер «10 Midcabin», «11 Hardtop» и «12 Hardtop»
Азы троллинга для начинающих рыболовов
Испытания канадской аэролодки «Хаски»
Испытания надувной РИБ мотолодки «Кайман» с алюминиевым корпусом
Испытания РИБ мотолодок «Орион-8ПМ» и «Орион-60 Спорт»
Маленькие хитрости для капитана парусной яхты
Мини-компьютер КПК + GPS-приемник
Компьютерный яхтенный симулятор «Virtual Skipper»
Гибель трехмачтового барка «Роял Чартер»
Вечный руль для парусной яхты «Ассоль»
Поддержание покрытий на самодельных судах
Построить мини-крейсер по силам каждому
Скоростной катер-перехватчик Фабио Буцци «FB RIB 33»
Испытания катеров «Camaro Even» и «Gagliardo 34»
Испытания катер «10 Midcabin», «11 Hardtop» и «12 Hardtop»
Ссылка на эту статью в различных форматах
HTMLTextBB Code
Комментарии к этой статье
Еще нет комментариев
Barque.ru © 2013 | Контакты | Карта сайта | Мобильная версия
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории