В последнее время на страницах иностранных яхтенных журналов появились сообщения об использовании новых приборов — детекторов РЛС — на яхтах, катерах и прочих малых судах для предупреждения столкновения с судами в условиях плохой видимости.
Принцип, положенный в основу этих приборов, не нов. Еще во время второй мировой войны на немецких подводных лодках устанавливались приборы, позволявшие обнаруживать оборудованные локаторами английские и американские самолеты задолго до появления отметки от подводной лодки на экранах их РЛС.
Действие прибора основано на приеме излучения судовых навигационных РЛС при помощи специальных радиоприемных устройств.
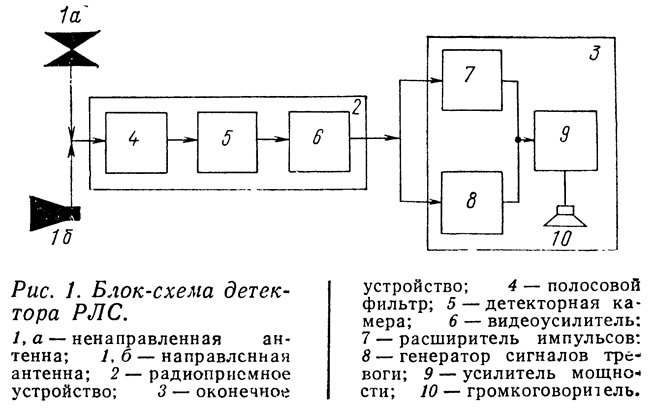
Рассмотрим некоторые варианты построения детекторов РЛС, их работу и способы применения. Прибор состоит из трех основных частей — антенны 1, радиоприемного 2 и оконечного 3 устройств (рис. 1). Оконечным устройством служит индикатор — громкоговоритель, звонок или сирена. В зависимости от назначения детектора РЛС его антенна может быть направленной и ненаправленной (всенаправленной).
Основное достоинство ненаправленных антенн — круговой прием — является одновременно и их недостатком, поскольку не позволяет определить направление (пеленг, курсовой угол) на источник излучения.
Для обнаружения судна и определения пеленга на него нужно применять обе антенны. При этом они могут либо поочередно работать на одно приемное устройство, либо каждая на свое. На яхтах с большими экипажами, несущими круглосуточную вахту, достаточно иметь один детектор РЛС с направленной антенной.
Работает детектор РЛС следующим образом. Антенна навигационного судового радиолокатора излучает в пространстве высокочастотные радиоимпульсы. За счет ее вращения импульсы на входе приемника оказываются промодулированными по амплитуде по закону, определяемому диаграммой направленности РЛС.
Принятые антенной 1 радиоимпульсы преобразуются в детекторной камере 5 в видеоимпульсы и усиливаются видеоусилителем 6. Усиленные видеоимпульсы подаются на оконечное устройство 3, которое может работать в режимах — «оповещение» или «наблюдение». При работе в режиме оповещения импульсы подаются на генератор сигналов тревоги 8. Когда принятые импульсы превысят порог срабатывания, запускается генератор, вырабатывающий колебания звуковой частоты, которые после усиления поступают на громкоговоритель.
Сигнал тревоги подается непрерывно вплоть до перевода детектора в режим наблюдения.
В режиме наблюдения видеоимпульсы подаются на расширитель 7. При использовании в качестве расширителя триггера со счетным входом (электронная схема, имеющая два положения, например, «О» и «1»), каждый импульс, превысивший порог его срабатывания, переводит триггер в новое состояние. В результате этого на его выходе получаются прямоугольные импульсы с длительностью, равной периоду следования сигналов РЛС. При использовании в качестве расширителя ждущего мультивибратора на каждый видеоимпульс вырабатывается импульс постоянной длительности, которая определяется величиной времязадающих элементов схемы. Расширенные импульсы после усиления подаются на громкоговоритель.
При работе детектора РЛС в режиме наблюдения, используя характеристики направленности антенн судовых радиолокаторов, можно производить качественную грубую оценку дальности. Для такой оценки используется свойство антенн излучать энергию не только главным лепестком диаграммы направленности, но и «паразитными» боковыми лепестками.
При вращении антенны РЛС уровень сигналов на входе приемника непрерывно и периодически меняется, в связи с чем звуковые сигналы воспроизводятся громкоговорителем в виде серий различной длительности, в зависимости от дальности.
На предельной дальности мощность сигналов ка входе приемника мала, порог срабатывания расширителя превышает только сравнительно небольшое количество импульсов, находящихся в главном лепестке диаграммы направленности. В этом случае громкоговоритель излучает короткие серии звуковых сигналов с периодом, равным периоду вращения РЛС.
По мере приближения судна мощность сигналов на входе приемника будет возрастать пропорционально квадрату уменьшения дальности. При дальнейшем сокращении расстояния порог срабатывания начнут превышать сигналы, излучаемые боковыми лепестками, в связи с чем излучаемые громкоговорителем серии будут удлиняться. И, наконец, на какой-то очень небольшой дальности начнется непрерывный прием сигналов.
Характер звукового сигнала для РЛС различных типов будет зависеть от мощности передатчика радиолокатора, коэффициента усиления антенны, уровня боковых лепестков и высоты установки антенны. В связи с этим возможна лишь очень грубая качественная оценка дальности типа «близко—далеко» и, главное, оценка изменения дальности («увеличивается — уменьшается»).
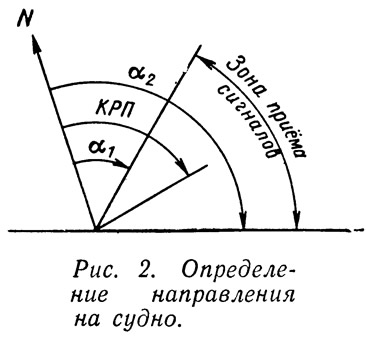
Направление на источник излучения определяют следующим образом. Обнаружив сигналы РЛС, вращением детектора в горизонтальной плоскости определяют направления, на котором они пропадают (рис. 2). Поделив полученный сектор приема сигналов пополам (курсовой угол), можно указать направление на судно. Если удастся привязать значение границ сектора приема к показаниям компаса, то можно получить компасный радиопеленг.
Детектор РЛС с ненаправленной антенной целесообразно установить на мачту, это увеличивает дальность его действия; оконечное устройство и батареи лучше разместить в каюте или кокпите.

- Главная
- Консультации
- Полезные устройства
- 1983 год
- Детектор РЛС для предупреждения столкновения с судами
Подкатегории раздела
Полезные устройства
Полезные советы
Улучшение судов
Улучшение моторов
Опыт эксплуатации
Техника плавания
Разбор аварий
Рыболовам
Поделитесь информацией
Похожие статьи
О количественной оценке загрязнения воды маломерными судами
Ошибки в управлении судами и парусами при шквале
Зрительные сигналы и знаки, выставляемые судами в дневное время
Надзор за судами передан в Речной Регистр РСФСР
Столкновение судна «Товарищ» с итальянским пароходом «Алькантара»
Столкновение в Северном море судов «Ибн Ту Файл» и «Алевтина и Туя»
Малые суда из стеклоцемента
Суда на воздушной подушке для туризма
Мелкие разборные суда комплекта «Ладога»
Стеклоцементные суда сборной конструкции
ГОСТ на прогулочно-туристские суда с 1974 года
Первые суда на воздушной подушке
Надувные туристские суда катамараны
Гоночные суда глазами японских конструкторов
Ошибки в управлении судами и парусами при шквале
Зрительные сигналы и знаки, выставляемые судами в дневное время
Надзор за судами передан в Речной Регистр РСФСР
Столкновение судна «Товарищ» с итальянским пароходом «Алькантара»
Столкновение в Северном море судов «Ибн Ту Файл» и «Алевтина и Туя»
Малые суда из стеклоцемента
Суда на воздушной подушке для туризма
Мелкие разборные суда комплекта «Ладога»
Стеклоцементные суда сборной конструкции
ГОСТ на прогулочно-туристские суда с 1974 года
Первые суда на воздушной подушке
Надувные туристские суда катамараны
Гоночные суда глазами японских конструкторов
Детектор РЛС для предупреждения столкновения с судами
Год: 1983. Номер журнала «Катера и Яхты»: 105 (Все статьи)
ПРЕДЫДУЩИЕ СТАТЬИ
Совершенствование разборной лодки «Автобот»
Ремонт пораженного участка деревянной палубы
Щиток аварийной сигнализации
Простейшие доработки мотора «Вихря»
Консультации по моторам «Ветерок», «Нептун» и «Прибой»
Кипятильники для туристов-водников
Рекомендации по управлению яхты класса «Солинг»
Как поднять спасаемого на борт яхты
Полезные мелочи: упор для ног, уключина, мотор на шлюпке, кильблок...
Из опыта эксплуатации мотолодки «Романтика»
Устройство для установки на мотора «Спутник» надувную лодку
Консультации по моторам «Стрела», «Москва» и «Ветерок»
Фиксация заднего хода мотора «Вихрь»
Две конструкции подмоторного кронштейна
Улучшение работы карбюратора на холостом ходу
Ремонт пораженного участка деревянной палубы
Щиток аварийной сигнализации
Простейшие доработки мотора «Вихря»
Консультации по моторам «Ветерок», «Нептун» и «Прибой»
Кипятильники для туристов-водников
Рекомендации по управлению яхты класса «Солинг»
Как поднять спасаемого на борт яхты
Полезные мелочи: упор для ног, уключина, мотор на шлюпке, кильблок...
Из опыта эксплуатации мотолодки «Романтика»
Устройство для установки на мотора «Спутник» надувную лодку
Консультации по моторам «Стрела», «Москва» и «Ветерок»
Фиксация заднего хода мотора «Вихрь»
Две конструкции подмоторного кронштейна
Улучшение работы карбюратора на холостом ходу
ТЕКУЩАЯ СТАТЬЯ
Детектор РЛС для предупреждения столкновения с судами
СЛЕДУЮЩИЕ СТАТЬИ
Несколько полезных морских узлов для туристов
Мачта стеклопластика для крейсерской яхты
Устройство для подъема человека на борт яхты
Подготовка «Прогресса» к дальним походам
Прямой парус на мотолодке «Прогресс»
Усовершенствования серийной лодки с подвесным мотором
Гидросигнализатор для контроля воды в корпусе судна
Стоянка лодок со спусковым устройством
Консультации по моторам «Ветерок», «Вихрь» и «Нептун»
Полезные мелочи: дифферент, бензиновая плитка, термометр...
Настройка швертбота «Летучий Голландец»
Парусный полигон для тренировок управления яхтой
Прибор для измерения относительной скорости яхты
Навигационные спутниковые системы и яхты
Комплекс дисциплин по навигации и судовождении судном
Мачта стеклопластика для крейсерской яхты
Устройство для подъема человека на борт яхты
Подготовка «Прогресса» к дальним походам
Прямой парус на мотолодке «Прогресс»
Усовершенствования серийной лодки с подвесным мотором
Гидросигнализатор для контроля воды в корпусе судна
Стоянка лодок со спусковым устройством
Консультации по моторам «Ветерок», «Вихрь» и «Нептун»
Полезные мелочи: дифферент, бензиновая плитка, термометр...
Настройка швертбота «Летучий Голландец»
Парусный полигон для тренировок управления яхтой
Прибор для измерения относительной скорости яхты
Навигационные спутниковые системы и яхты
Комплекс дисциплин по навигации и судовождении судном
Ссылка на эту статью в различных форматах
HTMLTextBB Code
Комментарии к этой статье
Еще нет комментариев
Barque.ru © 2013 | Контакты | Карта сайта | Мобильная версия
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории